



























Maintenance and inspection procedures
Fig.5-5 : Replacing the J1 axis timing belt
1) Turn the J1 axis to the front by jog operation beforehand. (joint angle is near 0 degree)
2) Turn off the robot controller.
3) Remove the machine cable or piping, etc. corresponding to the usage condition, and place the robot on the
floor sideways. Turn J1 motor cover upward, and place sideways slowly so that a shock may not be given to
the robot arm.
4) Please remove J1 motor cover and the bottom plate with reference to
Page 49, "5.3.2 Installing/removing the
.
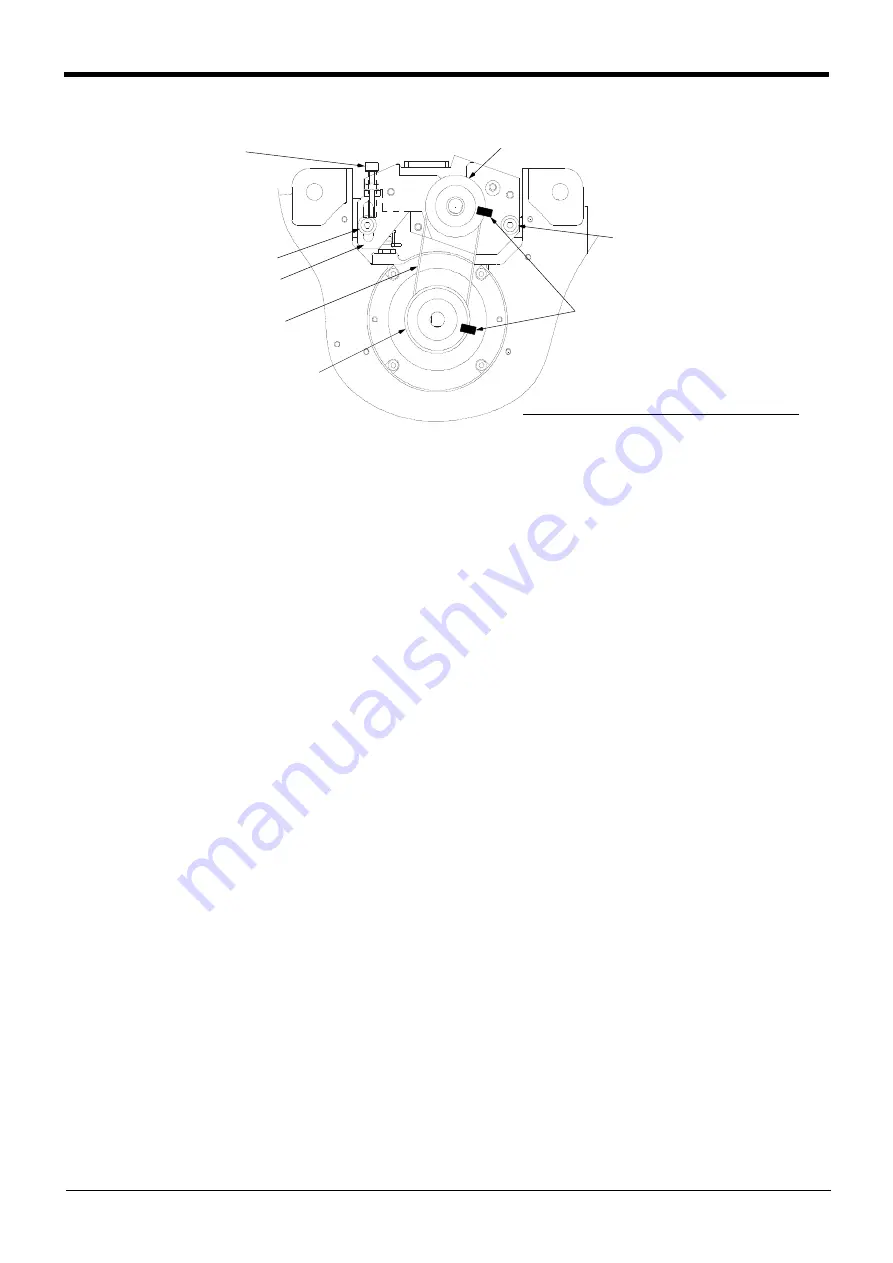
5) The image figure inside the bottom plate of the robot arm is shown in
6) Make sure that the pulleys do not move while replacing the belt. If the timing pulley <4> and <5> position
relation deviates, the position could deviate.
7) Make marks on the timing belt <2> and timing pulleys <4> and <5> with a felt-tip pen as shown in
so
that the engagement of the timing belt <2> and timing pulleys <4> and <5> does not deviate.
8) Lightly loosen the motor plate fixing screw <1>. (two pc.) (Do not loosen too much.)
9) Loosen the nut fixing tension adjustment screw <3>. Loosen the tension adjustment screw <3>, and remove
the old belt.
10) Copy the marks onto the new timing belt. Make sure that both belts are tense when making the marks.
11) Align the new timing belt with the marks on the timing pulleys <4> and <5>, and install.
12) The nut which is fixing tension adjustment screw <3> is loosened, turn tension adjustment screw <3>, and
adjust the tension of timing belt <2>.
When the screw is turned to the right, the belt will be stretched, and when turned to the left, will loosen.
Confirm that the belt tension is adjusted to slacken approx. 1.0mm when the center of the belt is lightly
pressed with a finger (approx. 2.0N).
13) After adjustment fastens the fixing nut of tension adjustment screw <3>, and certainly fixes tension
adjustment screw <3>. Moreover, also fasten motor plate fixing screws <1> certainly. (two pc.) Improper
tightening can cause the belt to loosen with vibration.
14) Reinstall the robot arm just as before.
15) The position could deviate after the belt is replaced. Confirm that the position has not deviated. If deviated,
refer to
Page 70, "5.6 Resetting the origin"
, and reset the origin position.
<3>Tension adjustment screw
With the fixing nut
<1>Motor plate fixing screw
<2>. Timing belt
<6>Motor plate
<1>Motor plate fixing screw
<4>. Timing pulley
<5>. Timing pulley
Mark
Inside of the bottom plate of robot arm (bottom)
Summary of Contents for RV-2F Series
Page 2: ......




































































