











Vérifier la fonction du gyroscope en vol
a) Service en mode normal
• Allumez l'émetteur en mode normal avec une sensibilité gyroscopique de 75% et mettez en marche
l'installation de réception dans le modèle réduit d'hélicoptère. Le levier de commande pour la fonction
Arrière et le levier de compensation correspondant doivent être placés en position médiane d'abord.
• Après l´initialisation, le témoin lumineux s´éteint.
• Faites décoller votre hélicoptère maintenant doucement et corrigez la dérive de l'arrière par la fonction
de compensation du rotor arrière.
• Après l'atterrissage, réglez la tringle de commande du rotor arrière de manière à ce que la position de
l'arrière reste stable en vol et que l´interrupteur coulissant de compensation de l'émetteur soit de
nouveau en position médiane.
b) Commutation du mode normal au mode AVCS
• Après que vous avez effectué tous les réglages en mode normal, vous pouvez commuter en mode AVCS
à l'aide du régulateur de la sensibilité gyroscopique. Veuillez tenir compte du fait que, au contraire du
mode normal, le mode AVCS requiert une sensibilité gyroscopique un peu inférieure.
Attention !
Si après la commutation en mode AVCS l'affichage DEL sur le gyroscope clignote deux fois
de manière rythmée cela signifie que la position neutre déterminée pendant le vol en mode
normal n'est pas identique à la position neutre en mode AVCS.
Dans ce cas, éteignez brièvement l’installation de réception puis rallumez-la après quelques
instants. La DEL doit s´allumer en continu.
Important :
Veuillez tenir compte du fait que le réglage du nouveau point neutre correct doit être vérifié
pour tous les états de vol (vol stationnaire, vol de plaisance, vol artistique).
• Après que le réglage de l'hélicoptère s'avère exacte en mode normal ainsi qu'en mode AVCS, vous
pouvez régler sur l'émetteur la réaction habituelle aux commandes de la fonction Arrière à l'aide de la
fonction Dual Rate ou fonction exponentielle.
Optimisation de la fonction gyroscopique
Après avoir effectué plusieurs vols d'essai avec votre modèle réduit d'hélicoptère et que vous avez ajusté
le gyroscope déjà en gros, vous pouvez procédez à l'optimisation des réglages du gyroscope.
A cet effet, faites fonctionner le gyroscope en mode AVCS avec une sensibilité gyroscopique de 100% et
effectuez les vols d'essai avec le même régime de la tête de rotor que vous utiliserez plus tard en vol.
a) Détermination de la sensibilité maximale du gyroscope
Faites voler votre modèle réduit d'hélicoptère d'abord aussi rapidement que possible vers l'avant. Braquez
alors légèrement le levier de commande pour la fonction Arrière et lâchez-le immédiatement, de sorte qu'il
rebondisse autour de la position neutre.
Si l'arrière se ressaisit sans s'élever, la sensibilité gyroscopique peut être augmentée. Si l'arrière continue
de s'élever cependant, la sensibilité est réglée trop haute. La sensibilité optimale est atteinte lorsque
l'arrière est tout près de s'élever encore.
Important :
La sensibilité gyroscopique maximale réglable dépend du régime du rotor principal.
Plus le régime du rotor principal est élevé, plus la sensibilité gyroscopique maximale volable
est faible.
b) Détermination de la longueur optimale du levier de commande
La longueur du levier du servo arrière (voir figure 3, pos. A) a un rapport direct à la sensibilité gyroscopique
maximale possible.
Si le levier du servo est trop long, la sensibilité gyroscopique maximale possible est trop faible.
Si le levier du servo est trop court, la sensibilité gyroscopique maximale possible est trop élevée.
Lors d'une sensibilité gyroscopique inférieure à 70%, le levier du servo devait être raccourci ou la tringle
de commande devait être montée à un endroit plus à l'intérieur du levier du servo.
Lors d'une sensibilité gyroscopique supérieure à 100%, le levier du servo devait être rallongé ou la tringle
de commande devait être montée à un endroit plus à l'extérieur du levier du servo.
Attention !
Après avoir modifié la longueur du levier du servo arrière, il est impératif d'ajuster de nouveau
la course maximale possible du servo à l'aide du régulateur «LIMIT» (voir figure 11, pos. 18).
Autrement, le servo arrière risque d'être endommagé par une surcharge.
c) Détermination de la vitesse de rotation optimale de l'axe de giration
Faites voler votre modèle réduit d'hélicoptère une rotation de 540° en faisant un braquage entier par le
levier de commande du rotor arrière.
La vitesse de rotation du modèle autour de l'axe de giration dépend exclusivement de la valeur ATV (menu
de réglage de l'émetteur pour le braquage maximal du servo). Selon vos besoins vous pouvez diminuer
ou augmenter cette valeur et l'ajuster à l'aide de la fonction Dual Rate ou exponentielle à vos habitudes
de commande individuelles.
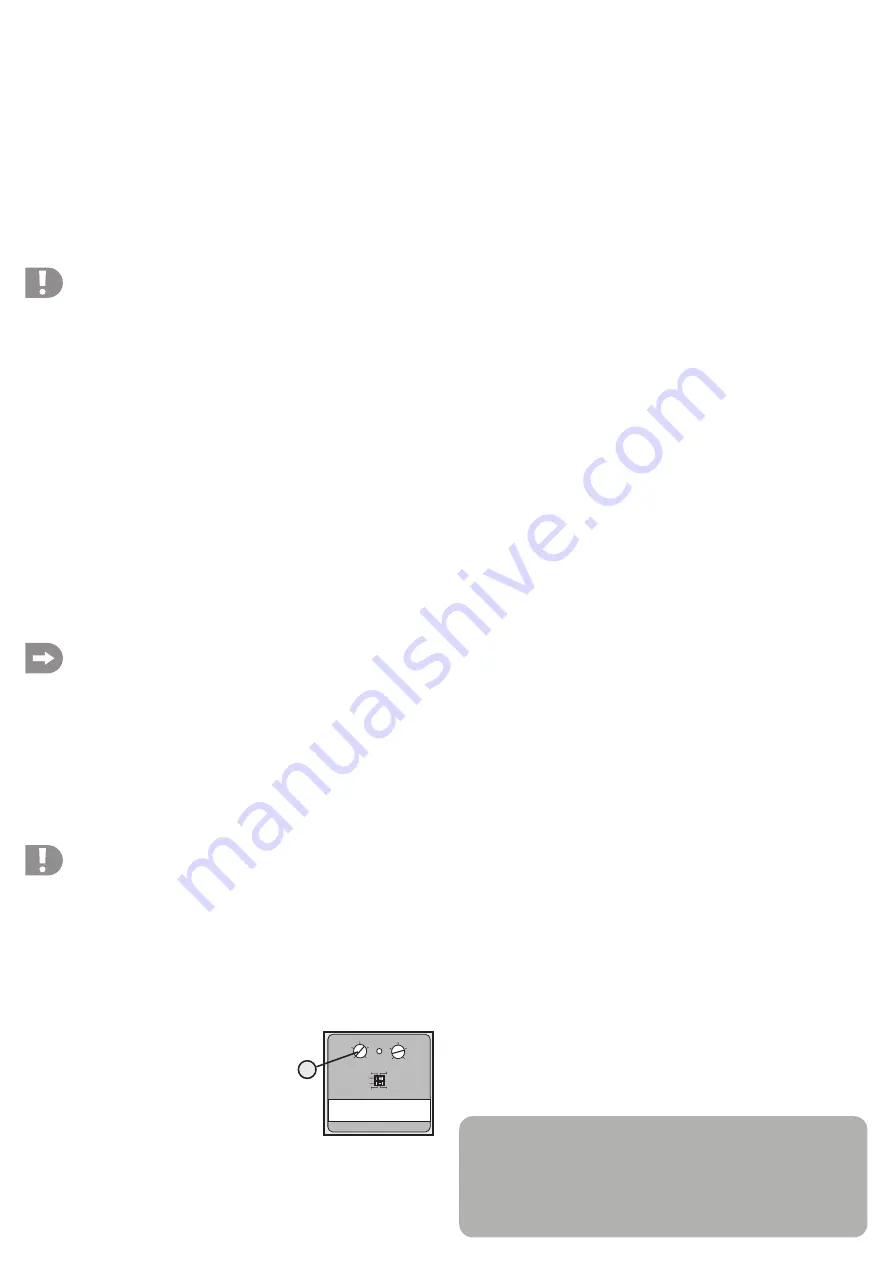
d) Réglage de la temporisation
Le régulateur «DELAY» vous permet d´optimiser le réglage du
gyroscope en mode AVCS au temps de réaction du servo utilisé. Si
vous utilisez un servo numérique de haute vitesse, vous pouvez
laisser la valeur réglée sur 0 (régulateur en butée gauche). Si vous
utilisez un servo analogique plus lent, il peut s'avérer nécessaire de
corriger cette valeur.
Si le modèle réduit d'hélicoptère n'arrête pas immédiatement le
mouvement de rotation après une pirouette, augmentez la
temporisation sur le régulateur «DELAY» (19) à l'aide du petit tournevis
de réglage (voir figure 1, pos. 6).
Ne faites que de petites modifications et contrôlez l'effet ensuite en
effectuant des vols d'essai.
Entretien et nettoyage
Pour le nettoyage externe du gyroscope, utilisez uniquement un chiffon sec et doux. N'utilisez en aucun
cas un détergent agressif ou une solution chimique, ceux-ci pouvant détériorer les surfaces du produit.
Elimination
Il convient de procéder à l'élimination du produit au terme de sa durée de vie conformément
aux prescriptions légales en vigueur.
Caractéristiques techniques
Tension de service : ................................... 4,8 à 6,0 V/CC
Consommation de courant : ....................... env. 80 mA
Système de connexion : ............................. Futaba
Plage de températures : ............................. -10 °C à +45 °C
Dimensions : ............................................... 28 x 28 x 20 mm
Poids, câbles de raccordement compris : . 24 g
MC 800
DELAY
LIMIT
OFF
ON
NOR
REV
DIR
DS
0
25
50
75
100
60
80
100
120
140
GYRO
AVCS
-
19
Figure 12
Ce mode d'emploi est une publication de la société Conrad Electronic SE, Klaus-Conrad-Str. 1,
D-92240 Hirschau (www.conrad.com).
Tous droits réservés, y compris de traduction. Toute reproduction, quelle qu'elle soit (p. ex.
photocopie, microfilm, saisie dans des installations de traitement de données) nécessite une
autorisation écrite de l'éditeur. Il est interdit de le réimprimer, même par extraits.
Ce mode d'emploi correspond au niveau technique du moment de la mise sous presse. Sous réserve
de modifications techniques et de l'équipement.
© Copyright 2009 by Conrad Electronic SE.























































