





























01/02 AWB8230-1413GB
PID control
117
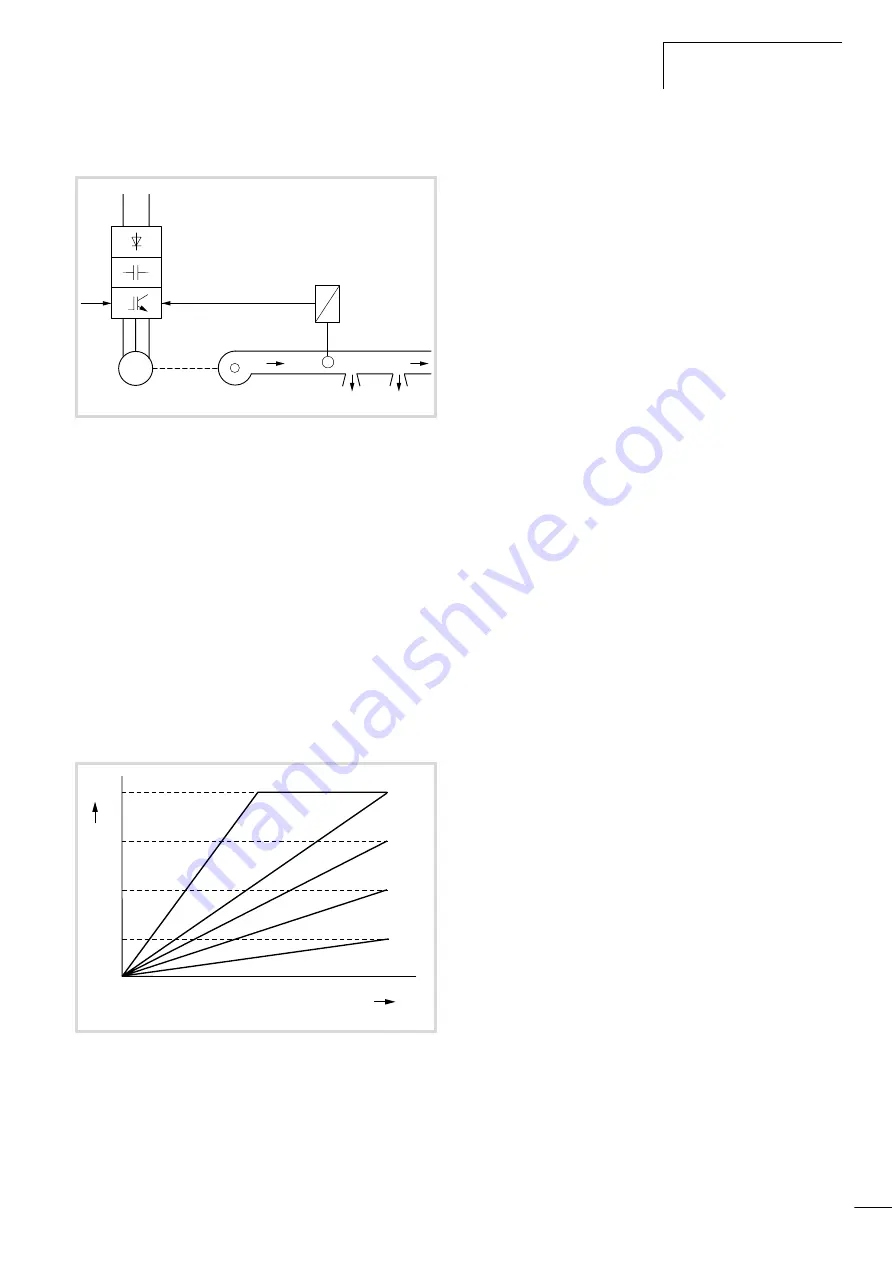
The example in the following figure shows a fan control system:
P: Proportional component
This component ensures that the output frequency and the system
deviation are proportional to each other. Using PNU A072, you
can define the proportional gain K
p
in %.
The following figure illustrates the relationship between system
deviation and output frequency. A large value of K
p
results in a
quick response to a change of the system deviation. If, however,
K
p
is too large, the system becomes unstable.
The maximum output frequency in figure 117 is defined as 100 %.
With PNU A072, you can set K
p
between 0.2 and 5.0.
I: Integral component
This component results in a correction of the output frequency by
integration of the system deviation. With purely proportional
control, a large control deviation results in an equally large change
in the output frequency; If, therefore, the control deviation is very
small, the change in the output frequency is also small. The
problem is that the system deviation cannot be completely
eliminated. Hence the need for an integral component.
The integral component causes a continuous adding up of the
system deviation so that the deviation can be reduced to zero. The
reciprocal value of the integration gain is the integration time
T
i
=1/K
i
.
For the DF6 frequency inverters, set the integration time (T
i
). The
value may be between 0.5 and 3600 s. To disable the integral
component, enter 0.0.
D: Differential component
This component causes a differentiation of the system deviation.
Because pure proportional control uses the current value of the
system deviation and pure integral control the values from
previous actions, a certain delay in the control process always
occurs. The D component compensates for this behaviour.
Differential control corrects the output frequency using the rate of
change of the system deviation. The output frequency can
therefore be compensated very quickly.
You can set K
d
between 0 and 100 s.
PID control
PID control combines the P, I and D components described in the
previous sections. In order to achieve the optimum control
characteristics, each of the three PID parameters must be set.
Uniform control behaviour without large steps in the output
frequency is guaranteed by the proportional component; the
integral component minimizes the existing system deviation the
steady-state and the differential component ensures a quick
response to a rapidly changing actual value signal.
As differential control is based on the differentiation of the system
deviation, it is very sensitive and also responds to unwanted
signals – such as interference – which can result in system
instability. Differential control is normally not required for flow,
pressure and temperature control.
Figure 116: Example of a fan control system
G1: DF6 frequency inverter
w: Setpoint
x: Actual value
P1: Controlled variable
B1: Measured value converter
a
Fan
Figure 117: Proportional gain K
p
x: System deviation
w
B1
P1
x
0... +10 V
H
; 4 – 20 mA
G1
a
M
3
~
100
100
50
75
25
0
75
50
25
[%]
f
x
[%]
Kp = 1
Kp = 0.75
Kp = 2
Kp = 0.5
Kp = 0.25
0.2
F
Kp
F
0.5
efesotomasyon.com - Klockner Moeller - inverter







































































