





























Moog ACV with CANopen bus interface
6 Signal routing and scaling
Local CAN
B99224-DV018-D-211, Rev. A, October 2018
103
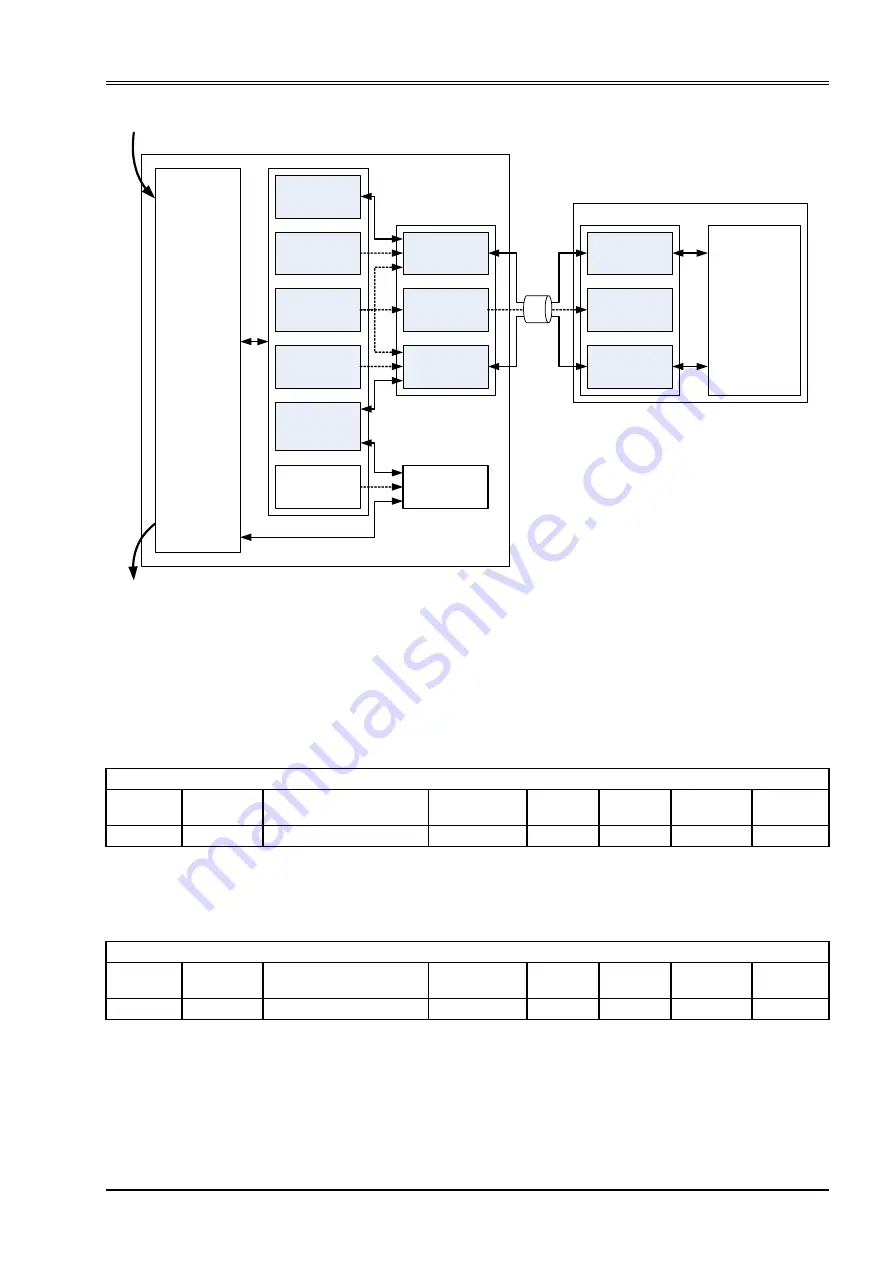
Figure 40: Structure of local CAN bus
6.9.1 Local CAN general configuration
6.9.1.1 Object 0x5B00: Module identifier
This parameter represents the local CAN identifier of the servo valve. A changed CAN identifier is effective
after the next reset. Therefore the identifier needs to be stored.
6.9.1.2 Object 0x5B01: Bit rate
The local CAN bit rate in bits per second.
Servo valve
CANopen interface
Object dictionary (OD)
SDO gateway
parameters
Local CAN
PDO configuration
parameters
Field bus
PDO mapping
parameters
Field bus
PDO
communication
Field bus /
Local CAN
PDO exchange
parameters
Local CAN gateway
SDO exchange
parameter
Local CAN
configuration
parameters
External CAN device
CAN interface
Local CAN
SDO gateway
over SDO protocol
Local CAN
PDO protocol
Local CAN
NMT protocol
(start remote node)
Object dictionary (OD)
CAN interface
External CAN device
SDO protocol
External CAN device
PDO protocol
External CAN device
NMT protocol
Field bus
Field bus
CAN
LocalCAN
Index
Sub-index
Parameter name
Data type
Access
Persis-
tence
Value range
Default
0x5B00
0
LocalCANModuleIdentifier
UINT8
rw
Y
1…127
127
LocalCAN
Index
Sub-index
Parameter name
Data type
Access
Persis-
tence
Value range
Default
0x5B01
0
LocalCANBitrate
UINT32
rw
Y
0…1000000
500000







































































