




























Moog ACV with CANopen bus interface
6 Signal routing and scaling
Local CAN
B99224-DV018-D-211, Rev. A, October 2018
106
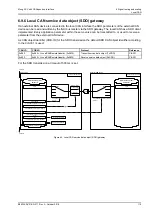
6.9.3 Receive process data object (RxPDO) configuration
To enable PDO reception, the local application parameters must be mapped to the receive PDO and a trans-
mission type must be selected for each PDO channel. Four receive PDO channels are available.
The mappings of the four possible local CAN receive RxPDOs is the same as the mapping of the field bus
RxPDO.
Chapter "2.8.3.2 RxPDO mapping (COB-ID: 0x200, 0x300, 0x400, 0x500)", page 21
The parameters described in the
Chapter "6.10 Free to use parameters", page 122
can be used to transmit
values to the external CAN device.
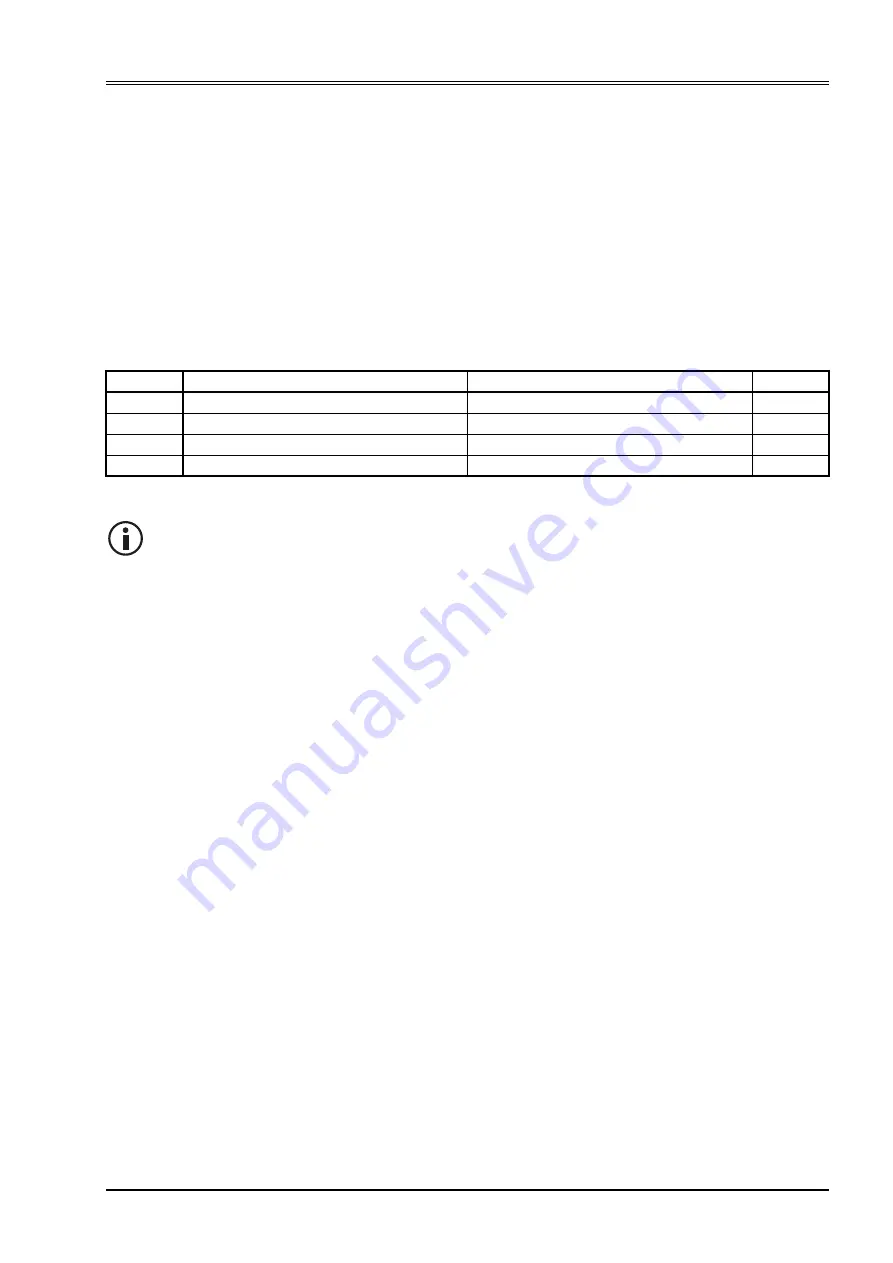
If the external CAN device uses the CAN-IDs according to the CiA 301, the CAN object identifier (COB-IDs)
<LocalCANPRdo1…4_CobIdUsedByPdo> (0x5400…0x5403) parameters can be configured with the
COB-IDs in the following table:
Chapter "6.9.6.3 Object 0x5B12: Remote node identifier", page 121
CAN-ID
COB-ID
Protocol
Reference
0x200
0x200 + Remote node identifier
First receive process data object (RxPDO)
CiA 301
0x300
0x300 + Remote node identifier
Second receive process data object (RxPDO)
CiA 301
0x400
0x400 + Remote node identifier
Third receive process data object (RxPDO)
CiA 301
0x500
0x500 + Remote node identifier
Fourth receive process data object (RxPDO)
CiA 301
Table 54: Receive PDOs and corresponding COB-IDs
Make sure that the receive identifiers <LocalRPdo1…4_CobIdUsedByPdo> are different to the
transmit identifiers <LocalTPdo1…4_CobIdUsedByPdo>.
Otherwise you receive your own response and you will not get a timeout fault!







































































