



























Moog ACV with CANopen bus interface
6 Signal routing and scaling
Local CAN
B99224-DV018-D-211, Rev. A, October 2018
121
6.9.6.3 Object 0x5B12: Remote node identifier
This parameter represents the node identifier of the external device.
This parameter must be different from the node identifier <LocalCANModuleIdentifier> (0x5B00) of the local
CAN bus of the servo valve.
6.9.6.4 Object 0x5B13: Remote transmission
Writing to the <LocalCANRemoteTransmission> (0x5B13) parameter initiates a read or write SDO transmis-
sion. The address of the considered remote parameter will be defined with the parameter
<LocalCANRemoteParameterAdress> (0x5B11). If the <LocalCANRemoteTransmission> is set to 1 (down-
load) the value of the address <LocalCANRemoteParameterAdress> (0x5B11) will be read and saved in the
local parameter defined by the <LocalCANRemoteParameter> (0x5B107). If
<LocalCANRemoteTransmission> (0x5B13) is set to 2 (upload), the local value at the address
<LocalCANRemoteParameter> (0x5B10) will be written to the remote parameter <LocalCANRemoteParame-
terAdress> (0x5B11).
Value description
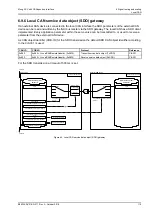
6.9.7 Local CAN Synchronization (SYNC) producer protocol emulation
The following configuration can be used to realize a synchronous PDO transmission between the servo valve
and the external CAN device.
Therefore use one of the PDO transmit channels to emulate a sync message telegram.
For example the following settings set up the fourth transmit PDO channel to act as SYNC producer:
LocalCAN
Index
Sub-index
Parameter name
Data type
Access
Persis-
tence
Value
range
Default
0x5B12
0
LocalCANRemoteNodeId
UINT8
rw
N
0…127
None
LocalCAN
Index
Sub-index
Parameter name
Data type
Access
Persis-
tence
Value
range
Default
0x5B13
0
LocalCANRemoteTransmission
INT8
rw
N
–1…2
None
<LocalCANRemoteTransmission>
Description
–1
Operation was not successful.
0
Operation was successful.
1
Execute a SDO download operation from the servo valve to the ex-
ternal CAN device.
If the download operation is successful the
<LocalCANRemoteTransmission> (0x5B13) changes to 0.
If the download operation is not successful the
<LocalCANRemoteTransmission> (0x5B13) changes to –1.
2
Execute an SDO upload operation from the external CAN device to
the servo valve.
If the upload operation is successful the
<LocalCANRemoteTransmission> (0x5B13) changes to 0.
If the upload operation is not successful the
<LocalCANRemoteTransmission> (0x5B13) changes to –1.
Table 68: Possible values of parameter <LocalCANRemoteTransmission> (0x5B13)
<LocalCANCobIdUsedByPdo> (0x5803#1):
0x80 (SYNC Protocol COB-ID)
<LocalCANEventTimer> (0x5803#3):
Sync cycle time in milliseconds
<LocalCANNumberOfMappedApplicationParametersInPdo> (0x5A03): 0 (no parameters mapped)







































































