





























Moog ACV with CANopen bus interface
7 Servo valve functions
Spool position controller
B99224-DV018-D-211, Rev. A, October 2018
156
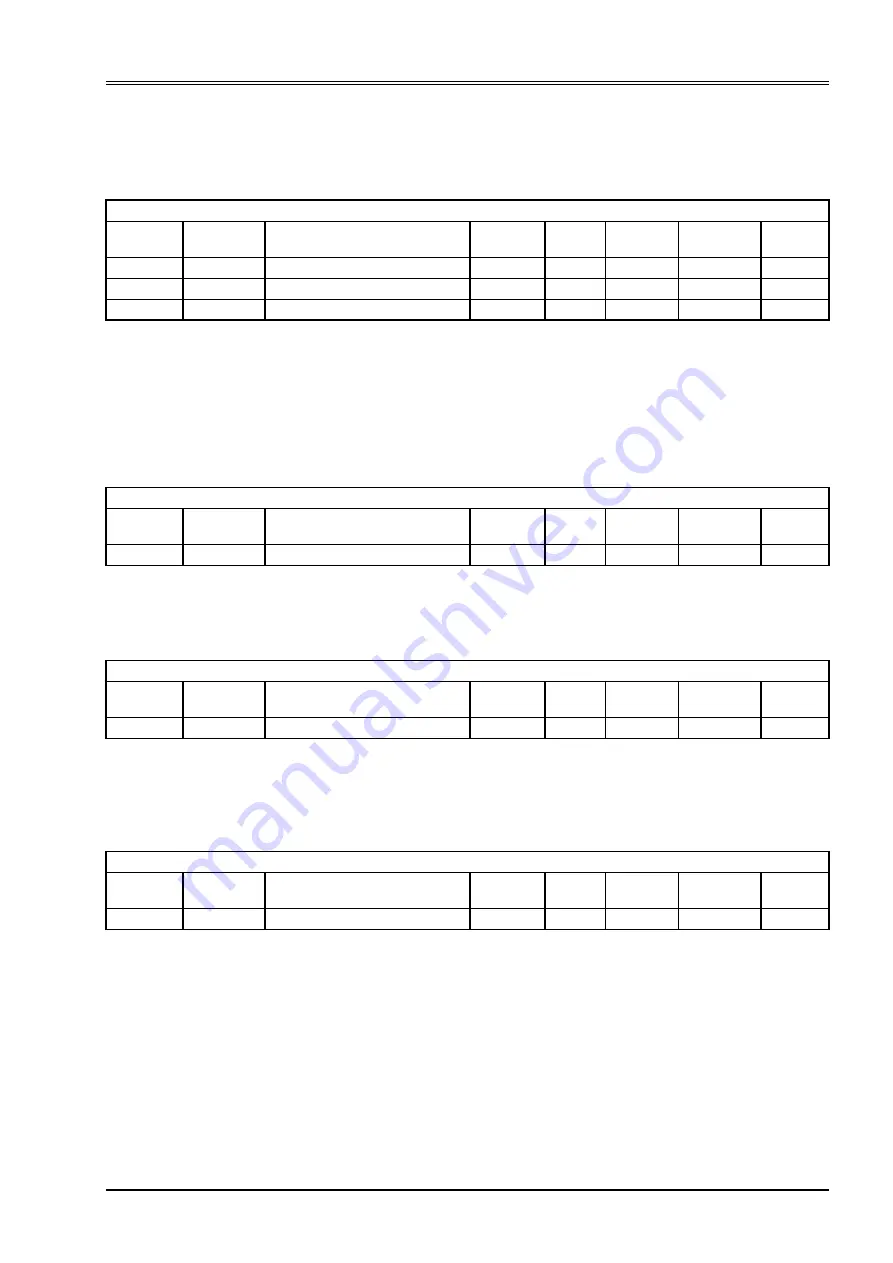
7.3.5.1 Object 0x6350: Control deviation
The control deviation is the difference between the setpoint value and the actual value. In case of a dual stage
servo valve this parameter holds the control deviation of the main stage spool position.
Chapter "2.4.3 Units and prefix parameter", page 12
7.3.5.2 Object 0x3302: Pilot Control deviation
The pilot control deviation is the difference between the setpoint value and the actual value. In case of a dual
stage servo valve, this parameter holds the control deviation of the pilot spool position. In case of a single
stage valve, this parameter has the same value as <SplControlDeviation> (0x6350).
7.3.5.3 Object 0x2416: Integrator Test Value
This parameter holds the controller output of the I-part of the pilot spool position controller.
7.3.5.4 Object 0x241F: Customer Overall Gain
This gain is accessible for the customer. It will be multiplied to the output of the pilot spool position controller.
(Gain over all of this controller.)
7.3.6 Main stage spool position actual value path
If a dual stage servo valve is used, the main stage spool position value is scaled and mapped to the signal
<ExternalLVDTActualValue> (0x3235) and the signal <SplActualValue> (0x6301).
Chapter "7.3.4.1 Object 0x6301: Actual value", page 155
ValvePositionControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value range
Default
0x6350
1
SplControlDeviation
INT16
ro
-
INT16
None
0x6350
2
Unit
UINT8
ro
-
UINT8
0
0x6350
3
Prefix
INT8
ro
-
INT8
0
IntegratorTestValue
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value range
Default
0x3302
0
PilotControlDeviation
INT16
r
Y
INT16
-
IntegratorTestValue
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value range
Default
0x2416
0
IntegratorTestValue
INT32
r
Y
INT32
-
ValvePositionControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value range
Default
0x241F
0
CustomerOverallGain
FLOAT32
rw
Y
0.0…2.0
1.0







































































