




























Moog ACV with CANopen bus interface
7 Servo valve functions
Axis velocity controller
B99224-DV018-D-211, Rev. A, October 2018
210
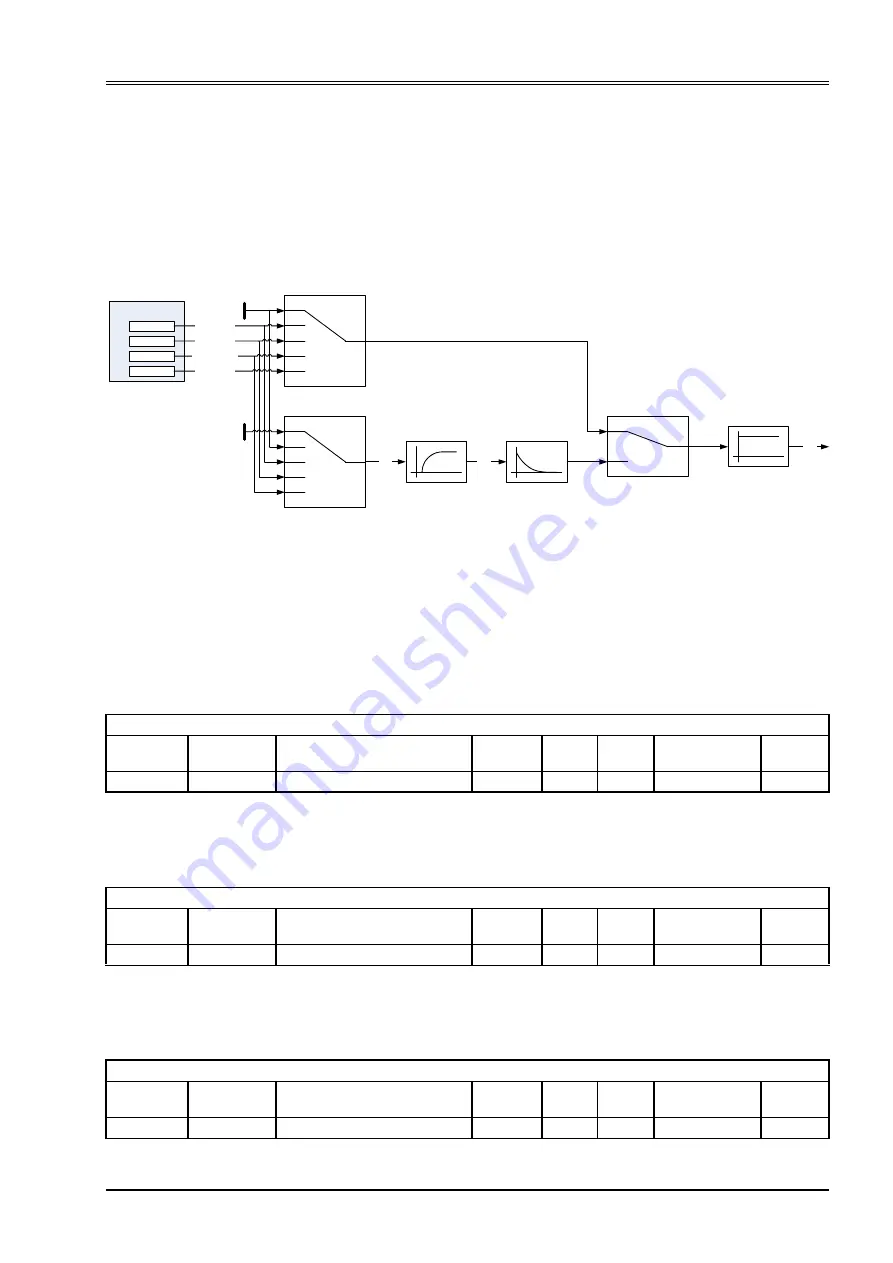
7.10.2 Axis velocity actual value
The axis velocity actual signal can either be read in via the transducer interface (if the encoder supplies a ve-
locity signal) or it can be calculated by derivation from the actual position value.
<VelActualPathMode> (0x5545) will select the used mode.
The parameter <VelActualValueReference> (0x5542) will select the interface in case the encoder supplies
the velocity signal. Otherwise the <PosActualValue1> (0x6601) needs to be filtered and derived to get the ac-
tual velocity. In both modes, the velocity is multiplied with <VelActualGain> (0x5544) to get the
<VelActualValue> (0x6501).
Figure 120: Axis velocity actual value
Chapter "7.8.14.1 Object 0x6602: Actual value reference", page 199
Chapter "7.8.1 Object 0x6601: Actual value", page 196
Chapter "7.10.3.3 Object 0x6550: Control deviation", page 212
7.10.2.1 Object 0x5542: Actual value reference
This parameter selects the transducer with the actual velocity input.
7.10.2.2 Object 0x5548: Actual value filter time constant
This parameter sets the time constant in seconds of the first order lag element (PT1).
7.10.2.3 Object 0x5552: Actual value filter output
This parameter holds the output of the axis velocity actual filter.
<Po
sAc
tu
alValue1>
(0
x6
601)
<VelActualFilterTimeConstant>
(0x5548)
Actual value path
transducer interface
Interface 1
Interface 2
Interface 3...7
Interface 8
<ActualValue4>
(0x6217)
<ActualValue3>
(0x6212...0x6216)
<ActualValue2>
(0x6211)
<ActualValue1>
(0x6210)
<PosActualValueReference1>
(0x6602)
<VelActualValueReference>
(0x5542)
<VelActualDerivativeLength>
(0x5550)
<VelActualGain>
(0x5544)
<
V
el
Ac
tu
alVal
ue
>
(0x
6
501)
1
0
<VelActualPathMode>
(0x5545)
1
2
3...7
8
0
1
2
3...7
8
0
<Vel
Po
sA
ct
ua
lV
alueF
ilt
er
Out
put
>
(0x
5552)
DriveVelocityControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence Value range
Default
0x5542
1
VelActualValueReference
UINT8
rw
Y
0…8
1
DriveVelocityControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence Value range
Default
0x5548
1
VelActualFilterTimeConstant
FLOAT32
rw
Y
0…+inf
0.0
DriveVelocityControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence Value range
Default
0x5552
1
VelPosActualValueFilterOutput
FLOAT32
ro
-
FLOAT32
None







































































