




























Moog ACV with CANopen bus interface
7 Servo valve functions
Axis velocity controller
B99224-DV018-D-211, Rev. A, October 2018
211
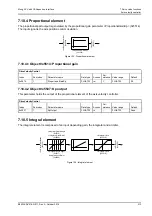
7.10.2.4 Object 0x5550: Actual derivative length
There is a special algorithm to calculate the derivation. The slope between two or up to twenty sampled posi-
tion points is used for calculation to get the average over a longer period. A high
<VelActualDerivativeLength> (0x5550) will give a smoother average signal but also a delay to the actual sig-
nal.
Figure 121: Actual derivative length
7.10.2.5 Object 0x5545: Actual value path mode
This switch selects the path of the controller input for the actual velocity.
Value description
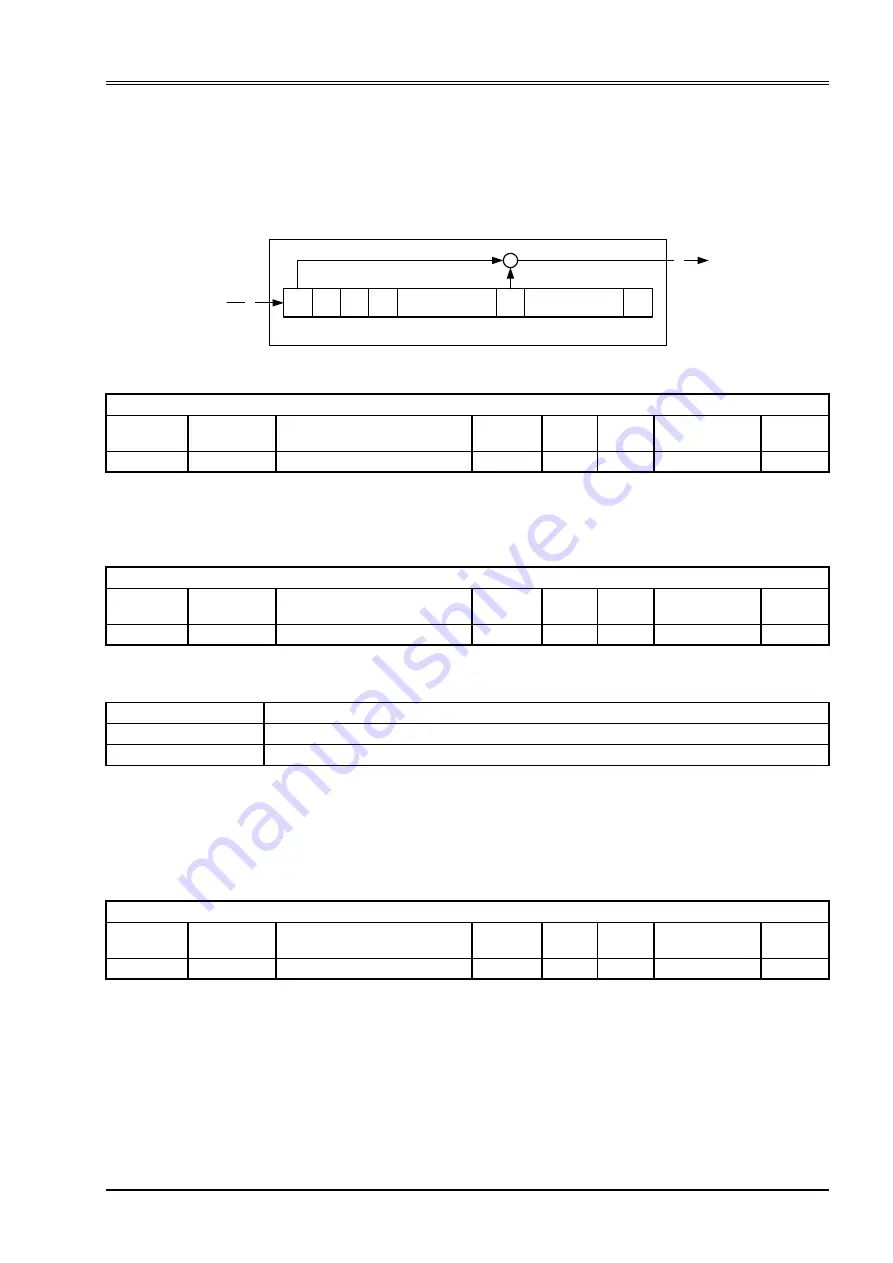
7.10.2.6 Object 0x5544: Actual value proportional gain
The actual velocity or the derived actual position is multiplied with this gain to get the
<VelActualValue> (0x6501).
x
i
x
i-3
x
i-2
x
i-1
x
i-20
x
i-n
...
...
o
ut
put
inpu
t
-
n : <VelActualDerivativeLength> (0x5550)
DriveVelocityControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence Value range
Default
0x5550
1
VelActualDerivativeLength
UINT8
rw
Y
1…20
1
DriveVelocityControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence Value range
Default
0x5545
1
VelActualPathMode
UINT8
rw
Y
0…1
0
<VelActualPathMode>
Description
0
The source for the actual velocity is the velocity transducer input.
1
The source for the actual velocity is the derivation of the position transducer input.
Table 86: Possible values of parameter <VelActualPathMode> (0x5545)
DriveVelocityControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence Value range
Default
0x5544
1
VelActualGain
FLOAT32
rw
Y
FLOAT32
0.0







































































