





























Moog ACV with CANopen bus interface
2 Access over CANopen
CANopen communication protocols
B99224-DV018-D-211, Rev. A, October 2018
18
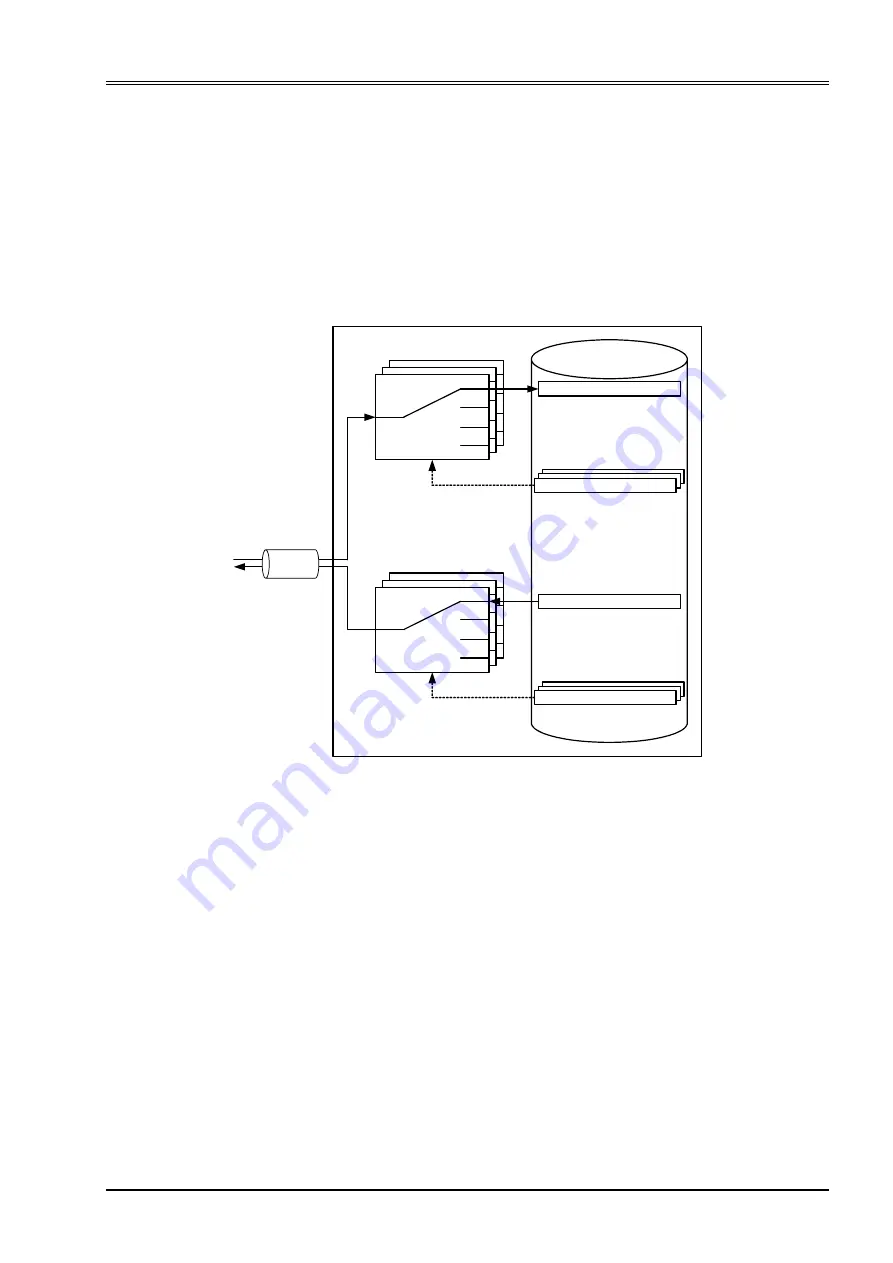
2.8.3 Process data object (PDO) protocol
The process data object (PDO) communication allows cyclic sending and receiving of parameters in real time.
Different transmission modes are available: synchronous, event or timer driven transmission.
Four TxPDOs and four RxPDOs are implemented:
• Receive process data object (RxPDO)
Chapter "2.8.3.1 RxPDO protocol configuration (COB-ID: 0x200, 0x300, 0x400, 0x500)", page 18
• Transmit process data object (TxPDO)
Chapter "2.8.3.4 TxPDO protocol configuration (COB-ID: 0x180, 0x280, 0x380, 0x480)", page 24
Figure 6: Process data object (PDO) mapping
2.8.3.1 RxPDO protocol configuration (COB-ID: 0x200, 0x300, 0x400, 0x500)
To enable receive process data object (RxPDO) transmission, the local application parameters must be
mapped to the RxPDO and a transmission type must be selected for each RxPDO channel. Four RxPDO
channels are available.
15
<StatusWord> (0x6041)
CANopen
TxPDO Mapping (0x1A00...0x1A03)
0x64100010
7
<ControlWord> (0x6040)
CANopen
RxPDO Mapping (0x1600...0x1603)
0x60400010
Digital servo valve
Object Dictionary (OD) /
Parameter
4 RxPDO channels with
8 mappable parameters
4 TxPDO channels with
8 mappable parameters
0x60410010
0x60400010
0x...
0x...
0x...
0x...
0x...
0x...
CANopen
1 …
3
2
1 …
3
2







































































