




























Moog ACV with CANopen bus interface
5 Device control
Local mode
B99224-DV018-D-211, Rev. A, October 2018
43
5 Device control
The device control contains a device state machine (DSM) which activates or deactivates the servo valve.
The states of the DSM can be changed externally by the <ControlWord> (0x6040) which can be set via bus
using a PDO or locally by the parameter value <LocalControlWord> (0x4040). It is possible to configure a
power on delay for the communication. The status LEDs display the current network and device states.
5.1 Local mode
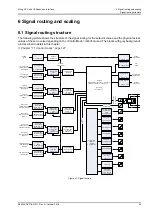
The source of the control word, acting on the device state machine, is defined by the parameter <Local>
(0x604F) as shown in the following figure.
Figure 18: Local mode
5.1.1 Object 0x604F: Local
By writing the value 1 to this parameter, the <LocalControlWord> (0x4040) is used as input signal
#ControlWord# for the device state machine (DSM). Setting the <Local> (0x604F) parameter to 0, the
<ControlWord> (0x6040) is used as input signal #ControlWord#.
Value description
The actual setting of the <Local> (0x604F) parameter is indicated in bit 4 of the <StatusWord> (0x6041).
Chapter "5.2.3 Object 0x6041: Status word", page 52
<Local> (0x604F)
<ControlWord>
(0x6040)
<LocalControlWord>
(0x4040)
0 (control word from bus)
1 (control word local)
Device State Machine (DSM)
#ControlWord#
<StatusWord>
(0x6041)
Device
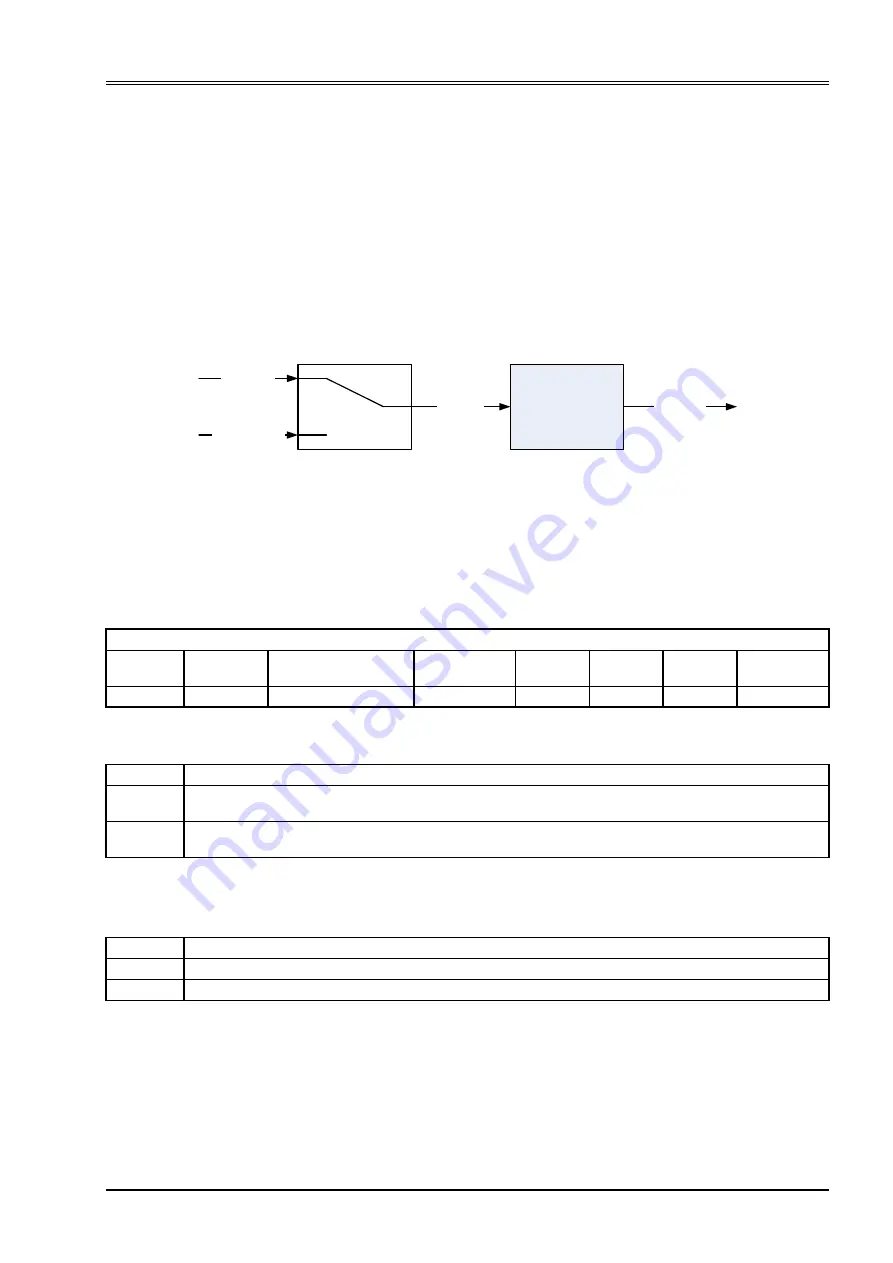
Index
Sub-index
Parameter name
Data type
Access
Persis-
tence
Value
range
Default
0x604F
0
Local
INT8
rw
Y
0…1
0
<Local>
Description
0
DSM controlled via bus by the <ControlWord> (0x6040). The <ControlWord> (0x6040) is used as input signal
#ControlWord# for the DSM.
1
DSM controlled by the <LocalControlWord> (0x4040). The <LocalControlWord> (0x4040) is used as input signal
#ControlWord# for the DSM.
Table 29: Possible values of parameter <Local> (0x604F)
Bit 4
Description
1
<LocalControlWord> is active.
0
<ControlWord> is active.







































































