




























Moog ACV with CANopen bus interface
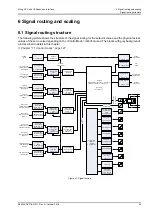
6 Signal routing and scaling
Setpoint value path
B99224-DV018-D-211, Rev. A, October 2018
66
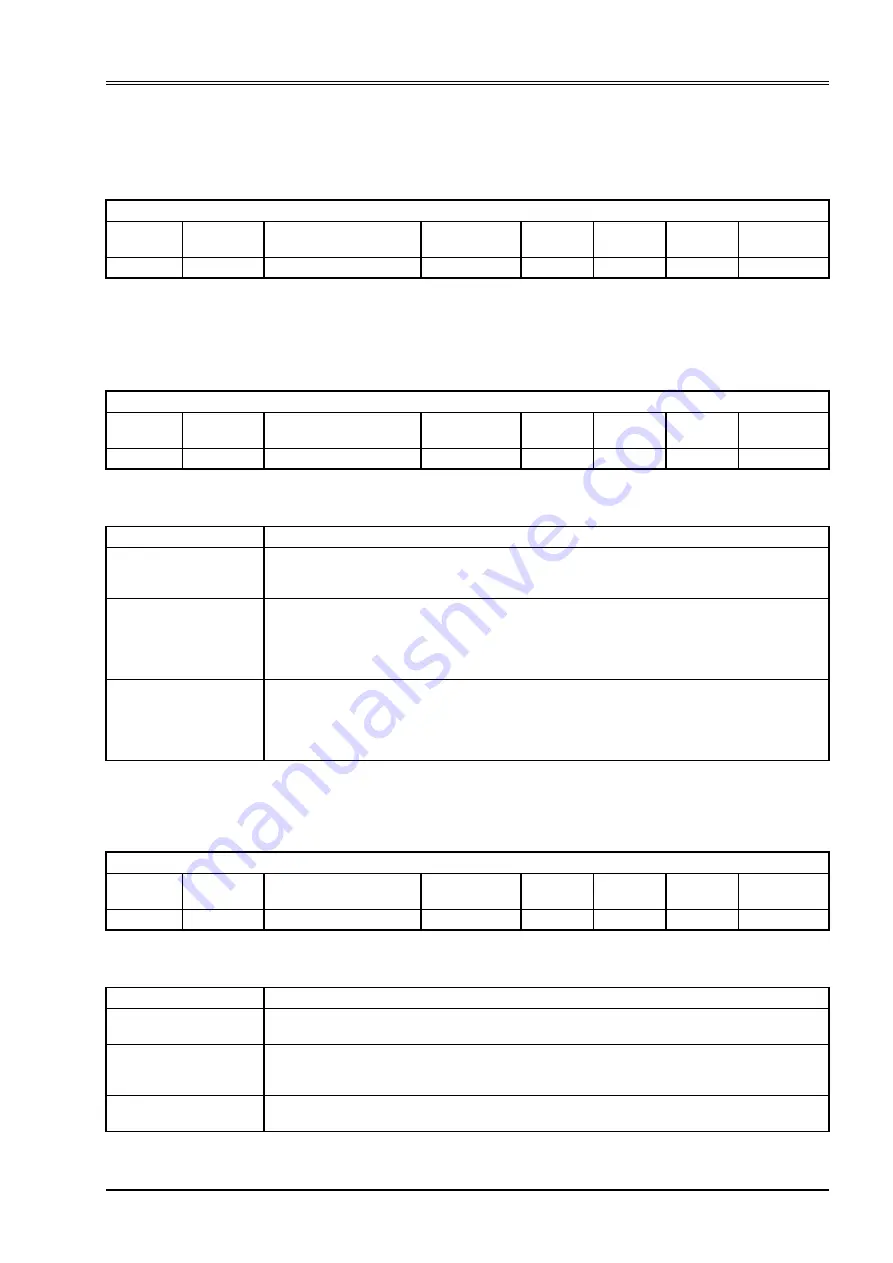
6.2.5.4.4 Object 0x5510: Maximum interface
This parameter together with the parameter <PosMaximumReference> (0x4231) results in the second point
of the linear scaling function.
6.2.5.5 Object 0x5700: Trajectory Type
With the type it is possible to switch the trajectory off or enable it in the state machine state 'ACTIVE' or
'HOLD'.
Value description
6.2.5.6 Object 0x585C: Hold setpoint target
Value description
DrivePositionControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value
range
Default
0x5510
0x00
PosMaximumInterface
INT32
rw
Y
INT32
16384
DrivePositionControl_DemandValueGenerator
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value
range
Default
0x5700
0
TrajectoryType
INT8
rw
Y
0…2
0
<TrajectoryType>
Behavior of preload output
0 (no trajectory)
The trajectory signals for axis velocity and acceleration are calculated as derivation of the axis position
signal.
Chapter "7.7.4 Axis position trajectory generator", page 193
1 (only 'ACTIVE')
The trajectory signals for axis position, velocity and acceleration are calculated as realtime trajectory
based on the axis position signal.
The trajectory generator is effective, if the device state machine state <StatusWord> (0x6041) is in the
state 'ACTIVE'.
Chapter "7.7.4 Axis position trajectory generator", page 193
2 ('ACTIVE' and 'HOLD')
The trajectory signals for axis position, velocity and acceleration are calculated as realtime trajectory
based on the axis position signal.
The trajectory generator is effective, if the device state machine state <StatusWord> (0x6041) is in the
state 'ACTIVE' or 'HOLD'.
Chapter "7.7.4 Axis position trajectory generator", page 193
Table 36: Possible values of parameter <TrajectoryType> (0x5700
DrivePositionControl_DemandValueGenerator
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value
range
Default
0x585C
0
HoldSetpointTarget
INT8
rw
Y
0…2
0
<HoldSetpointTarget>
Target position of the trajectory
0 (hold position)
The target position of the trajectory is jumping to the <PosHoldSetpoint> (0x6614) while the
<StatusWord> (0x6041) is changing from 'ACTIVE' to 'HOLD'.
1 (demand position)
The target position of the trajectory is jumping to the <DemandValue> (0x6610) while the
<StatusWord> (0x6041) is changing from 'ACTIVE' to 'HOLD'. The axis will be stopped with maximal ac-
celeration.
2 (actual position)
The target position of the trajectory is jumping to the <PosActualValue1> (0x6601) while the
<StatusWord> (0x6041) is changing from 'ACTIVE' to 'HOLD'.
Table 37: Possible values of parameter <HoldSetpointTarget> (0x585C)







































































