





























MOOG
ID
No.:
CB40859-001
Date:
02/2018
MSD Servo Drive - Device Help
122
7 Control
7.3.4.8 FadeOut function
At higher speeds it usually makes sense to linearly fade the Q-current feed forward
control of the detent torque compensation using the FadeOut function:
P 447[3] - CON_TAB_Tune[3].FadeOutStart: fader starting speed
P 447[4] - CON_TAB_Tune[4].FadeOutEnd: fader ending speed.
Rastmoment-
kompensation
FadeStartSpeed
0 %
100 %
FadeEndSpeed
cogging
compensation
Fig. 7.14: FadeStartSpeed and FadeEndSpeed
7.3.5 Advanced torque control
Torque control is expanded by three functions in order to optimize the control
dynamics of the current and speed controllers.
Adaptation of torque control / Saturation characteristic (see Section
"Adaptation of torque control" on page 122).
Observer system (see Section "Observer" on page 124)
Overmodulation: (see Section "Overmodulation" on page 124)
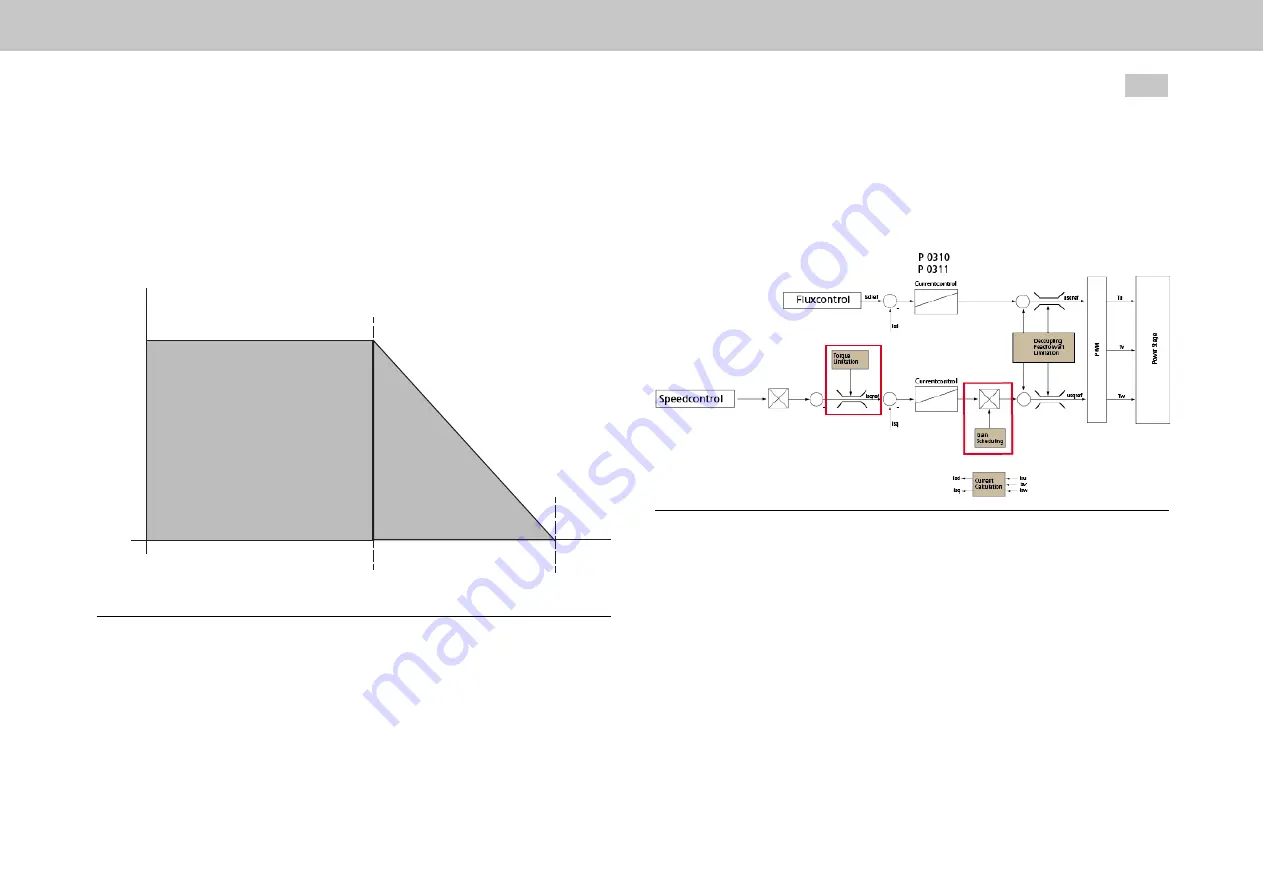
Fig. 7.15: Structure of expanded torque control
7.3.5.1 Adaptation of torque control
7.3.5.1.1 Saturation characteristic
In the overload range, saturation effects reduce the inductance of many motors. As a
result, the current controller optimized to the rated current may oscillate or become
unstable. In this case the gain of the current controller should be adapted to the load
case by way of four interpolation points. The values for the interpolation points are
entered in the dialog box as a percentage of the rated current. On the left are the
inductance values, and on the right the values for the overload (> 100% of rated
current).







































































