











• Signal to ESC: 1520us
Firmware Version: 1.6:
Pre-installed firmware.
• Dualcopter
• Tricopter
• Y6
• Quad
• Quadcopter X
• Hex
• Hexcopter X
• Octo
• Octocopter X
• X8 +
• X8 X
• H8
• H6
• V8
• V6
• Aero 1S Aileron
• Aero 2S Aileron
• Flying Wing
• Singlecopter 2M 2S
• Singlecopter 1M 4S
The Mixer Editor allows you to adjust where and how much signal the motors receive from stick input and
sensors. This allows you to create any configuration possible with up to 8 motors or servos.
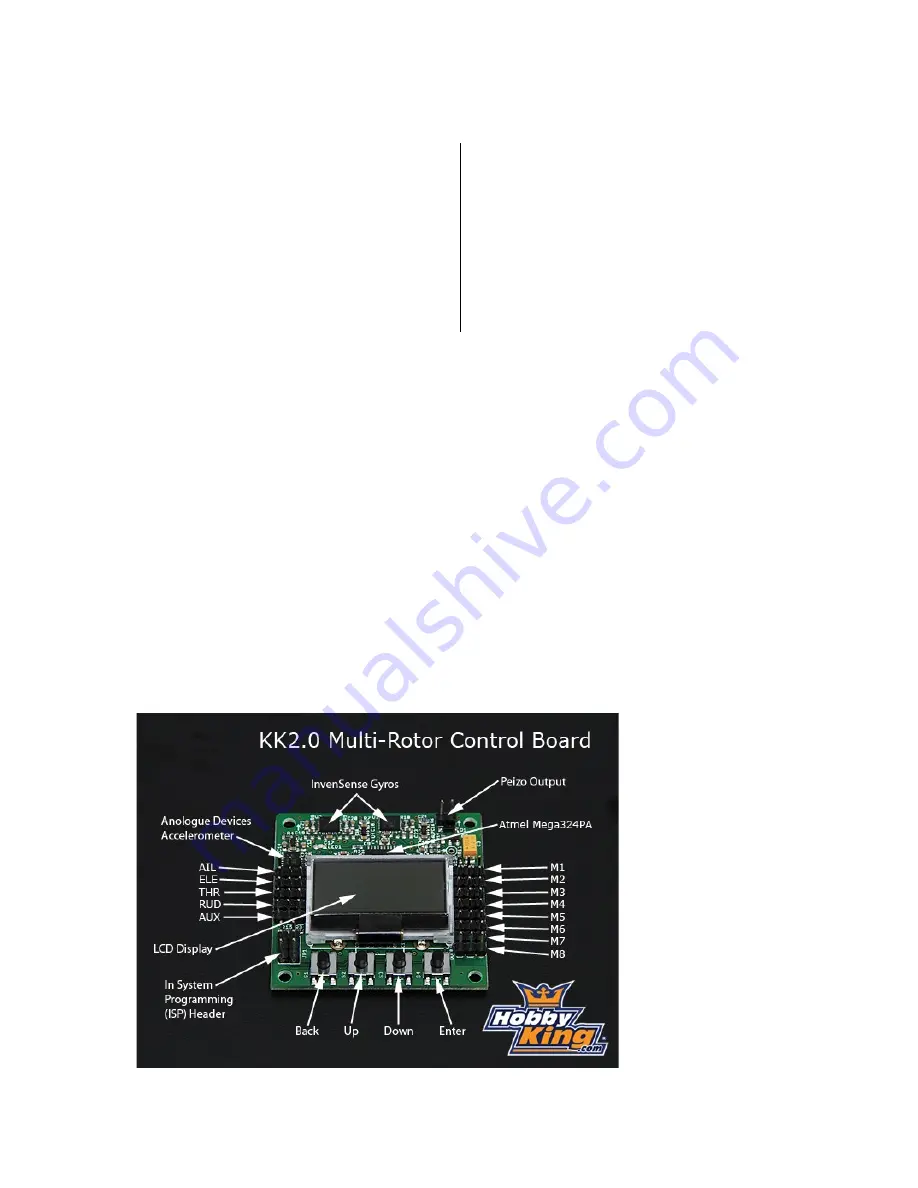
What is a Multi-Rotor Control board you ask?
The HobbyKing KK2.1.5 Multi-Rotor controller is a flight control board for multi-rotor aircraft
(Tricopters, Quadcopters, Hexcopters etc). Its purpose is to stabilize the aircraft during flight. To do this it
takes the signal from the 6050MPU gyro/acc (roll, pitch and yaw) then passes the signal to the
Atmega644PA IC. The Atmega644PA IC unit then processes these signals according the users selected
firmware and passes control signals to the installed Electronic Speed Controllers (ESCs). These signals
instruct the ESCs to make fine adjustments to the motors rotational speed which in turn stabilizes your
multi-rotor craft.
The HobbyKing KK2.1.5 Multi-Rotor control board also uses signals from your radio systems receiver
(Rx) and passes these signals to the Atmega644PA IC via the aileron, elevator, throttle and rudder inputs.
Once this information has been processed the IC will send varying signals to the ESCs which in turn adjust
the rotational speed of each motor to induce controlled flight (up, down, backwards, forwards, left, right,
yaw).
INITIAL
SETUP



























































