





























4.2 Setting of parameters
4-5
4.2.1 Setting of mechanism parameters
1
Open <Constant Setting> - [3 machine constants]
–
[34 Robot monitoring
unit]
–
[1 Setting]
–
[1 Mechanism parameters].
The following screen will be displayed.
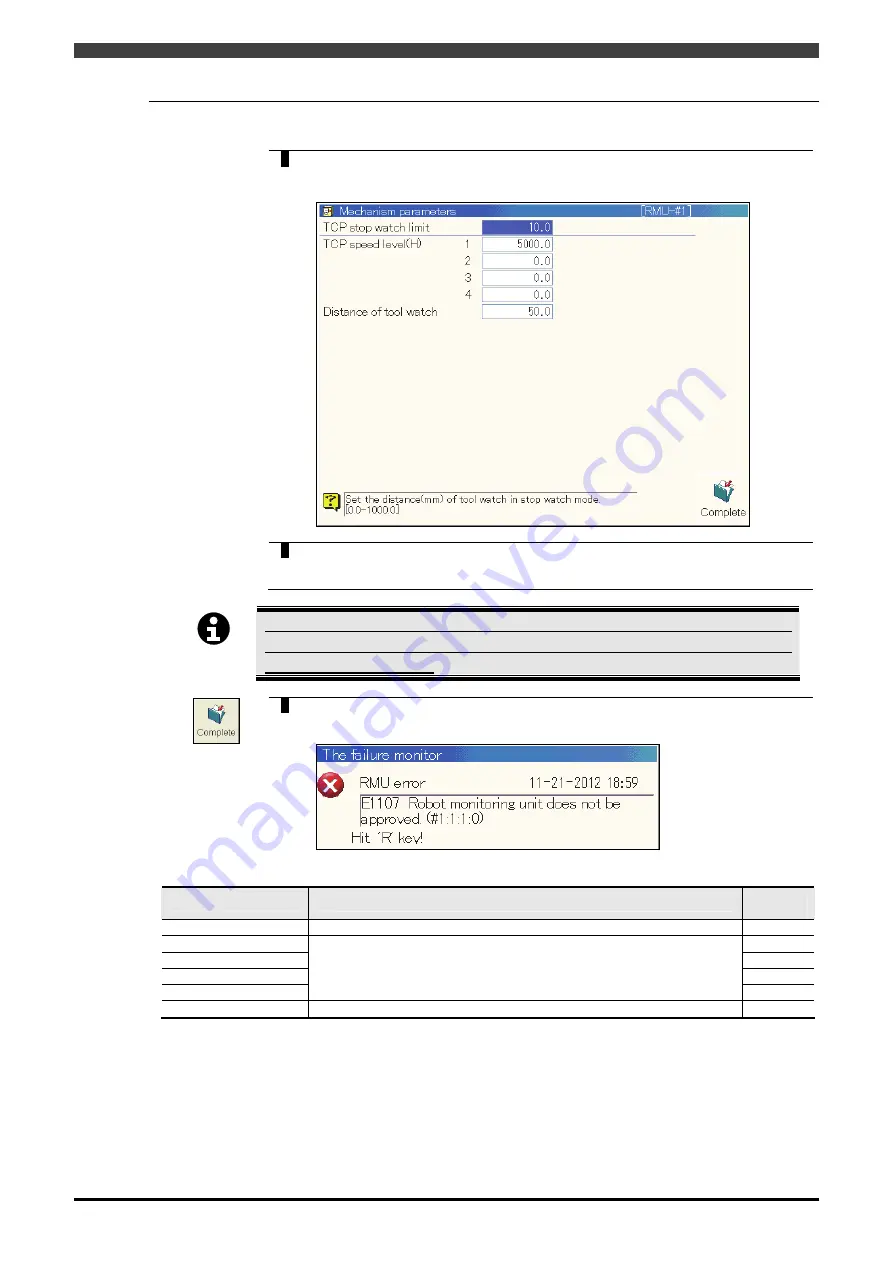
2
Set the required parameters with reference to the following table.
If there is no parameter to be updated, following operation is necessary.
IMPORTANT
If the RMU had been replaced or backup-restore operation had
been executed, perform writing operation even if there are no
modified parameters.
3
After setting, press f12 <Complete>.
When setting is done correctly, following message is displayed. But this is normal.
After closing this message with [R] key, perform the confirmation operation.
Table 4-3 Mechanism parameters
Parameter
Function
Default
value
TCP stop watch limit
This is the error detection distance (mm) of the “Stop monitoring”.
10
TCP speed level (H)1
5000
TCP speed level (H)2
0
TCP speed level (H)3
0
TCP speed level (H)4
This is the error detection speed (mm/sec.) in AUTO mode of the “TCP
speed monitoring”.
0
Distance of tool watch This is the error detection distance (mm) of “Tool number monitoring”.
50
"-" : These parameters differ from the robot.
Operator class of
SPECIALIST
is necessary to change these parameters.
Summary of Contents for RMU20-20
Page 2: ......
Page 6: ...Contents 4 ...
Page 8: ......
Page 26: ...1 4 EC DECLARATION OF CONFORMITY FOR MACHINERY 1 18 NOTE ...
Page 68: ...2 9 Enabling RMU 2 40 NOTE ...
Page 70: ......
Page 100: ...3 4 Setting when a slider unit is used 3 30 NOTE ...
Page 102: ......
Page 138: ...4 4Approval 4 36 8 Approval is completed The following screen will be displayed ...
Page 144: ......
Page 154: ...5 4Trouble shooting 5 10 NOTE ...
Page 156: ......
Page 166: ...6 4Trouble shooting 6 10 NOTE ...
Page 168: ......
Page 189: ......


































































