





























2.1 Connections with External Equipment
2-1
2.1 Connections with External Equipment
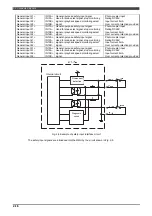
This section gives an example of how the RMU, the robot controller and the external equipment may be
connected. This particular example shows the connections for a system in which two robots are operated by one
teach pendant, but it is just an example: in reality, there are many and varied systems, and the safety measures
required are also different.
Fig. 2-1 Example of connections with external equipment
非常停止スイッチ
教示/再生切替スイッチ 等
Emergency stop
Teach/Auto switch
非常停止
安全停止
保護停止
Emergency stop
Safety stop
Protection stop
非常停止スイッチ
イネーブルスイッチ
Emergency stop
Enable switch
パラメータ設定
Parameter setting
Summary of Contents for RMU20-20
Page 2: ......
Page 6: ...Contents 4 ...
Page 8: ......
Page 26: ...1 4 EC DECLARATION OF CONFORMITY FOR MACHINERY 1 18 NOTE ...
Page 68: ...2 9 Enabling RMU 2 40 NOTE ...
Page 70: ......
Page 100: ...3 4 Setting when a slider unit is used 3 30 NOTE ...
Page 102: ......
Page 138: ...4 4Approval 4 36 8 Approval is completed The following screen will be displayed ...
Page 144: ......
Page 154: ...5 4Trouble shooting 5 10 NOTE ...
Page 156: ......
Page 166: ...6 4Trouble shooting 6 10 NOTE ...
Page 168: ......
Page 189: ......







































































