





























2.5 Operating Range, Angle and Speed Monitoring Function
2-28
2.5.7 Stop Control monitoring Function in Area
The run-over distance that will be made when the robot make an emergency stop will be estimated by
referring to the robot motion speed. And the RMU shuts off the safety output to stop the robot safely considering
the estimated run-over distance.
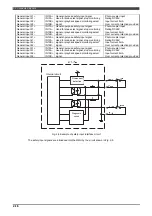
“Estimating the overrun distance” is calculated as follows.
Estimating the overrun distancee = Free running di Braking distance
TCP speed is calculated every 10msec. “Estimating the overrun distance” is calculated from free running
distance and braking distance. Free running distance and braking distance is calculated from free running time
and braking deceleration time which is set as parameter.
Safety output shut off
Safety
Area
Stop area within safety area
Stop the robot inside this
distance by estimating the
overrun distance
TCP speed
Free running time
Deceleration time
Free running
distance
Braking
distance
Summary of Contents for RMU20-20
Page 2: ......
Page 6: ...Contents 4 ...
Page 8: ......
Page 26: ...1 4 EC DECLARATION OF CONFORMITY FOR MACHINERY 1 18 NOTE ...
Page 68: ...2 9 Enabling RMU 2 40 NOTE ...
Page 70: ......
Page 100: ...3 4 Setting when a slider unit is used 3 30 NOTE ...
Page 102: ......
Page 138: ...4 4Approval 4 36 8 Approval is completed The following screen will be displayed ...
Page 144: ......
Page 154: ...5 4Trouble shooting 5 10 NOTE ...
Page 156: ......
Page 166: ...6 4Trouble shooting 6 10 NOTE ...
Page 168: ......
Page 189: ......







































































