





























3.4 Setting when a slider unit is used
3-27
3.4
Setting when a slider unit is used
When a robot is installed on a slider (traverse unit), it is necessary to setup the “Mechanism relation” and the
“Installation angle” correctly. Please be sure that when not correct, the TCP position check cannot executed
normally.
3.4.1
Mechanism relation
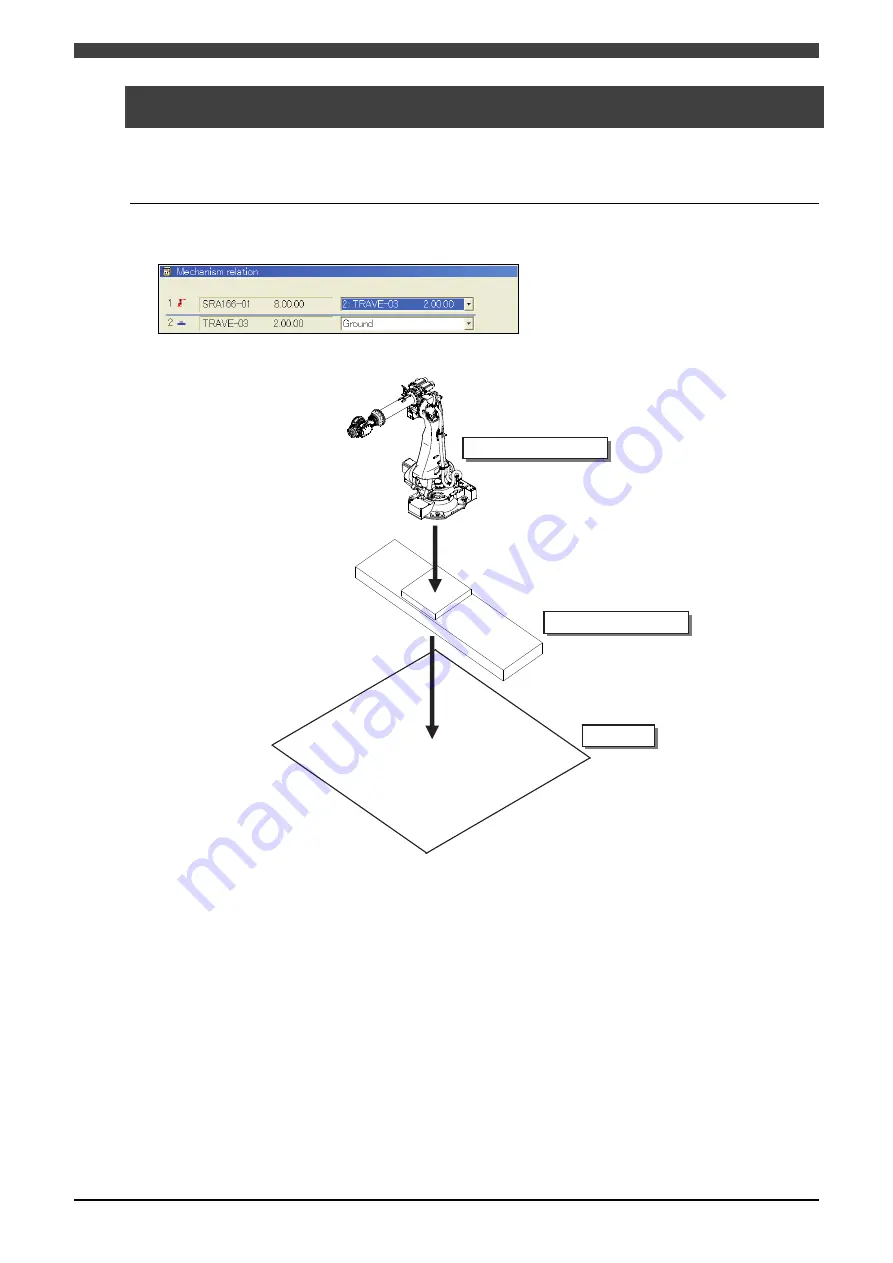
<Constant Setting> - [12 Format and Configuration] [9 Mechanism relation]
Place the robot (M1) on the slider (M2). Place the slider (M2) on the “Ground”.
Ground
M2: Slider
M1 : Robot
Summary of Contents for RMU20-20
Page 2: ......
Page 6: ...Contents 4 ...
Page 8: ......
Page 26: ...1 4 EC DECLARATION OF CONFORMITY FOR MACHINERY 1 18 NOTE ...
Page 68: ...2 9 Enabling RMU 2 40 NOTE ...
Page 70: ......
Page 100: ...3 4 Setting when a slider unit is used 3 30 NOTE ...
Page 102: ......
Page 138: ...4 4Approval 4 36 8 Approval is completed The following screen will be displayed ...
Page 144: ......
Page 154: ...5 4Trouble shooting 5 10 NOTE ...
Page 156: ......
Page 166: ...6 4Trouble shooting 6 10 NOTE ...
Page 168: ......
Page 189: ......







































































