
























Page-11
6. Allowable wrist load
CAUTION
Load fixed on the tip of wrist is regulated by “allowable payload mass”, “allowable static
load torque”, and “allowable moment of inertia”. Strictly keep the wrist load within each
allowable value. If wrist load exceeds the allowable value, this robot is out of guarantee.
Refer to the table of “2. Basic specifications” and following figures for the detail of each
specification.
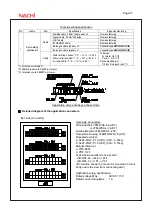
■
Torque map
C.O.G. of wrist load should exist inside the range shown below.
【
SRA220H-01
】
【
SRA220HV-01
】
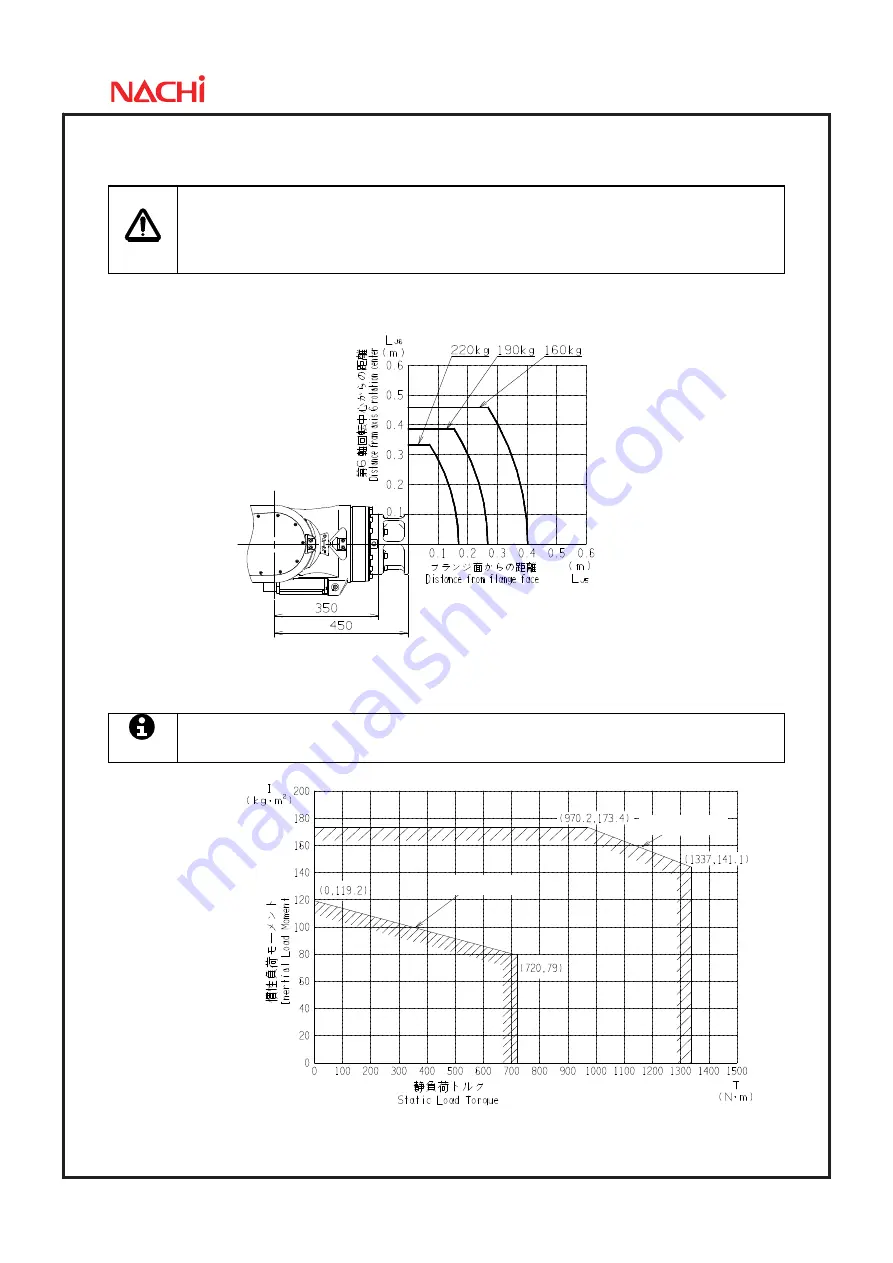
■
Wrist load conditions
Static load torque and moment of inertia of wrist load should exist inside the range shown below.
IMPORTANT
If the real inertia is over the limit written in “2. Basic specifications”, maximum speed will
be restrained by software.
【
SRA220H-01
】
【
SRA220HV-01
】
Axis 4, 5
Axis 6
Summary of Contents for SRA220H Series
Page 1: ...Standard specifications SRA220H 01 FD11 SRA220HV 01 FD11 7th edition 1707 SSRAEN 064 007 001 ...
Page 5: ...Page 3 3 Robot dimensions and working envelope SRA220H 01 ...
Page 6: ...Page 4 SRA220HV 01 ...
Page 11: ...Page 9 SRA220HV 01 Robot type ...
Page 20: ...Page 18 8 2 Spot welding specification 2 Connecting diagram Standard ...
Page 25: ......






































































