





























NAL Research Corporation (TN2014-001-V1.4.5)
16
The third Normal Tracking option is “Callable (Moving Yes | Still No)”. This is a hybrid between the “Callable
(Yes)” and “Callable (No)” configurations. When in motion the 9602-LP uses a set of “Callable (Yes)”
parameters to send GPS reports and when not in motion the 9602-LP uses a set of “Callable (No)” parameters
to send GPS reports. The goal is to allow users the flexibility to define different set of parameters for different
operating conditions. For example, a stationary vehicle only needs to send position report perhaps once a day.
However, when in motion a higher reporting frequency is required.
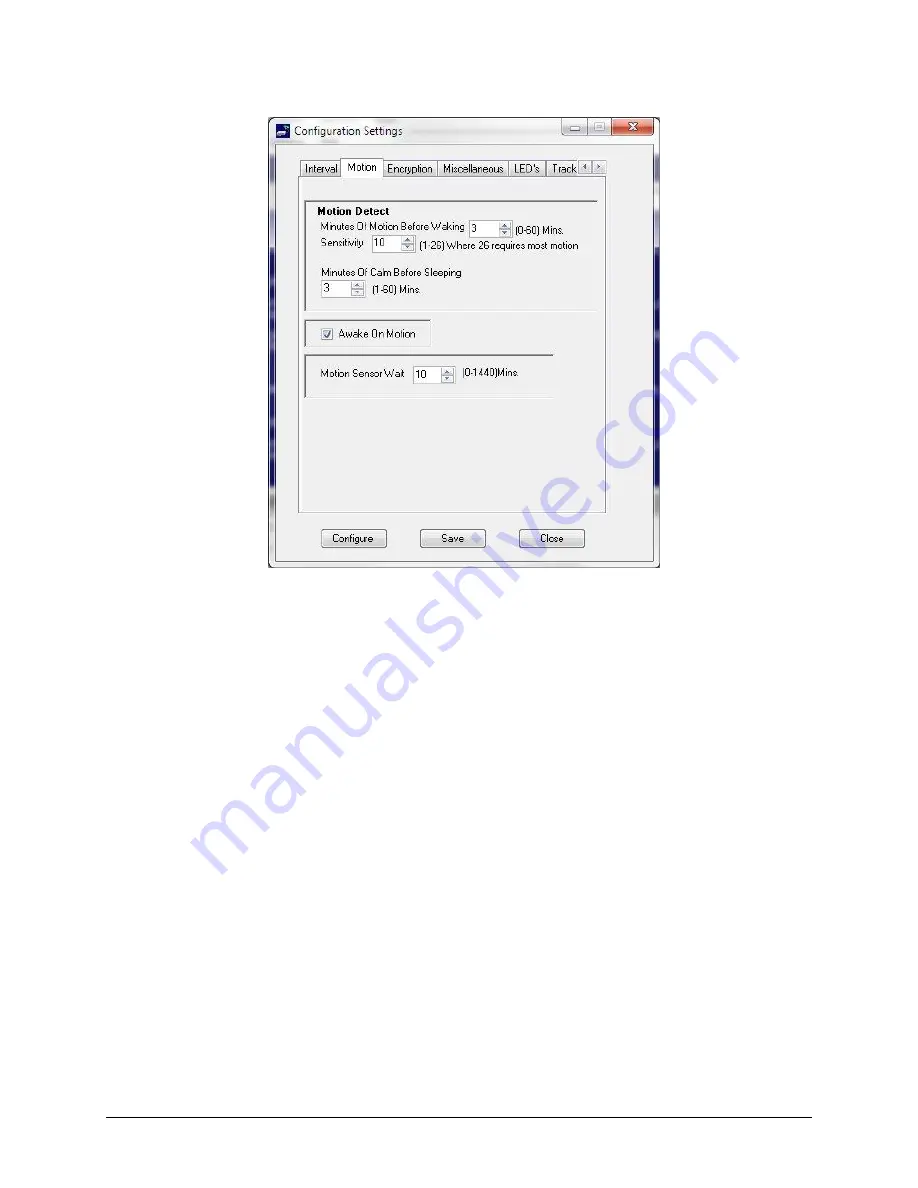
The setup parameters for “Callable (Moving Yes | Still No)” and “not in motion or Low Power” are shown
in Figure 9. These parameters are very similar to the standard “Callable (No)” option except there is no “Awake
on Motion”. The 9602-LP uses “Minutes of Motion Before Waking” and “Sensitivity” to determine if
valid motion
is observed by applying the same approach described previously. Once
valid motion
is determined, the 9602-
LP switches to “Callable (Moving Yes | Still No)” and “in motion” mode.
The setup parameters for “Callable (Moving Yes | Still No)” and “in motion or Motion” are similar to the
“Callable (Yes)” option except the motion sensor is active. The 9602-LP uses “Minutes of Motion Before
Waking” and “Sensitivity” to determine if
valid motion
is observed by applying the same approach described
above. If
valid motion
is not detected before the “Minutes of Calm Before Sleeping” expires, the 9602-LP
switches back to “not in motion or Low Power” mode.
Figure 8.
SatTerm Setup Window for Normal Tracking and “Awake on Motion”.





































































