





























Technical Manual PD4-E-M (EtherCAT)
10 Description of the object dictionary
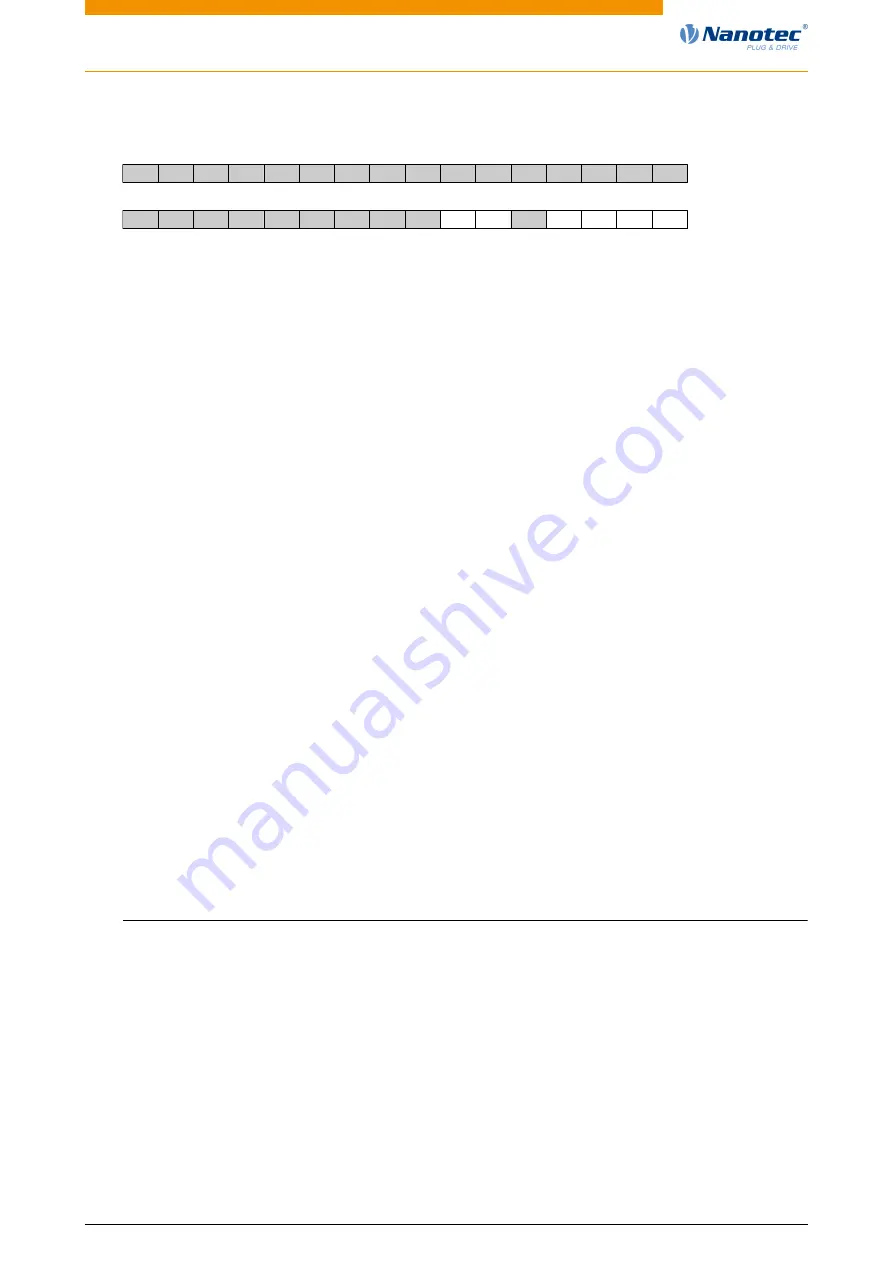
Description
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
15
14
13
12
11
10
9
8
Torque
7
6
5
4
3
2
1
0
BLDC
VoS CL/OL
CurRed Brake
CL/OL
Changeover between open loop and closed loop
•
Value = "0": open loop
•
Value = "1": closed loop
VoS
Value = "1": Simulate V-controller with an S-ramp: simulate the speed modes through
continuous position changes
Brake
Value = "1": Switch on automatic brake control
CurRed (Current Reduction)
Value = "1": Current reduction activated in open loop
Torque
only active in operating modes Profile Torque and Cyclic Synchronous Torque
Value = "1": M-controller is active, otherwise a V-controller is superimposed: no V-controller is
used in the torque modes for speed limiting, thus object 6080
h
h
:3 and 3210
:4
have no effect on the control.
BLDC
Value = "1": Motor type "BLDC" (brushless DC motor)
3203h Feedback Selection
Function
In this object, the sources of the presets are defined for the commutation and the speed and position
control.
Object description
Index
3203
h
Object name
Feedback Selection
Object Code
ARRAY
Data type
UNSIGNED8
Savable
yes, category: drive
Access
read only
PDO mapping
RX-PDO
Allowed values
Preset value
Firmware version
FIR-v1748-B533384
Version: 1.0.1 / FIR-v1748
186







































































