





























Technical Manual PD4-E-M (EtherCAT)
7 Special functions
current
t1
t2
t1
Lim
t2
Lim
I
2
t
I
2
t
t
Maximum
current
Nominal
current
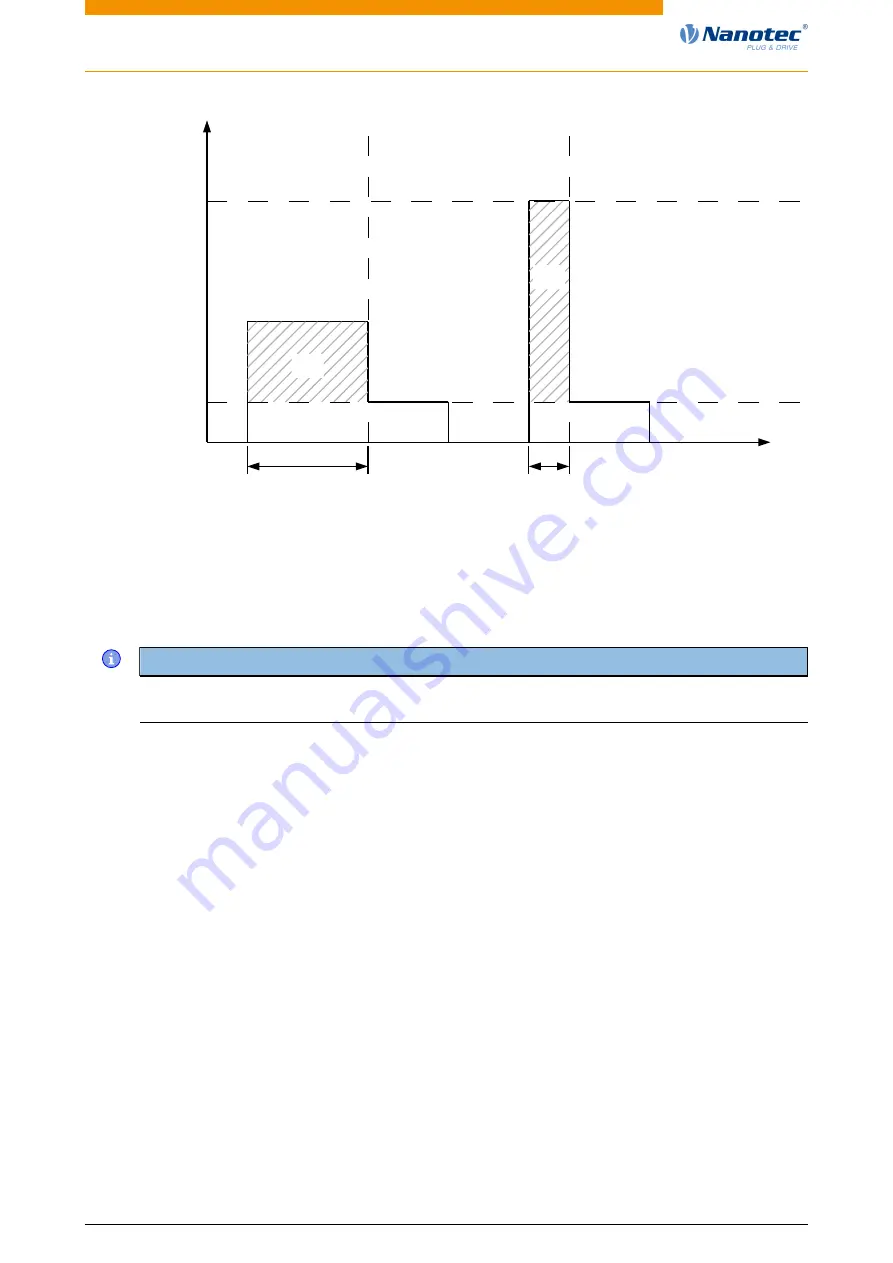
In the first section, t1, the current value is higher than the rated current. At time t1
Lim
, I
2
t
Lim
is reached
and the current is limited to the rated current. A current that corresponds to the maximum current then
occurs for a period of time t2. Hence, the value for I
2
t
Lim
is reached more quickly than in time t1.
7.3 Saving objects
Note
Improper use of the function can result in it no longer being possible to start the controller. Therefore,
carefully read the entire chapter before using the function.
7.3.1 General
Many objects in the object dictionary can be saved and then automatically reloaded the next time the
controller is switched on or reset. Furthermore, the saved values are also retained following a firmware
update.
Only entire collections of objects (referred to in the following as categories) can be saved together;
individual objects cannot be saved.
An object can be assigned one of the following categories:
•
Communication: Parameters related to external interfaces, such as PDO configuration etc.
•
Application: Parameters related to operating modes.
•
User: Parameters that are written and read by the customer/user only and are ignored by the
controller firmware.
•
Movement: Parameters related to the motor and the sensors (BLDC/Stepper, Closed/Open
Loop…). Some are set and saved by auto setup.
•
Tuning: Parameters related to motor and encoder that are set either by auto setup or that can be
found in the data sheets, e.g., pole pairs and maximum current.
If an object is not assigned one of these categories, it cannot be saved, e.g., statusword and all objects
whose value is dependent on the current state of the controller.
The objects in each category are listed below. In chapter Description of the object dictionary, the
corresponding category for each object is also specified.
Version: 1.0.1 / FIR-v1748
88







































































