




























©
National Instruments Corporation
19
MID-7604/7602 Power Drive User Guide
Closed-loop stepper applications require consistent directional polarity
between the motor and encoder for correct operation. The National
Instruments motion control standard directional polarity is as follows:
•
Positive = forward = clockwise (CW) facing motor shaft
•
Negative = reverse = counter-clockwise (CCW) facing motor shaft
Figure 8 shows clockwise and counter-clockwise motor rotation.
Figure 8.
Clockwise and Counter-Clockwise Motor Rotation
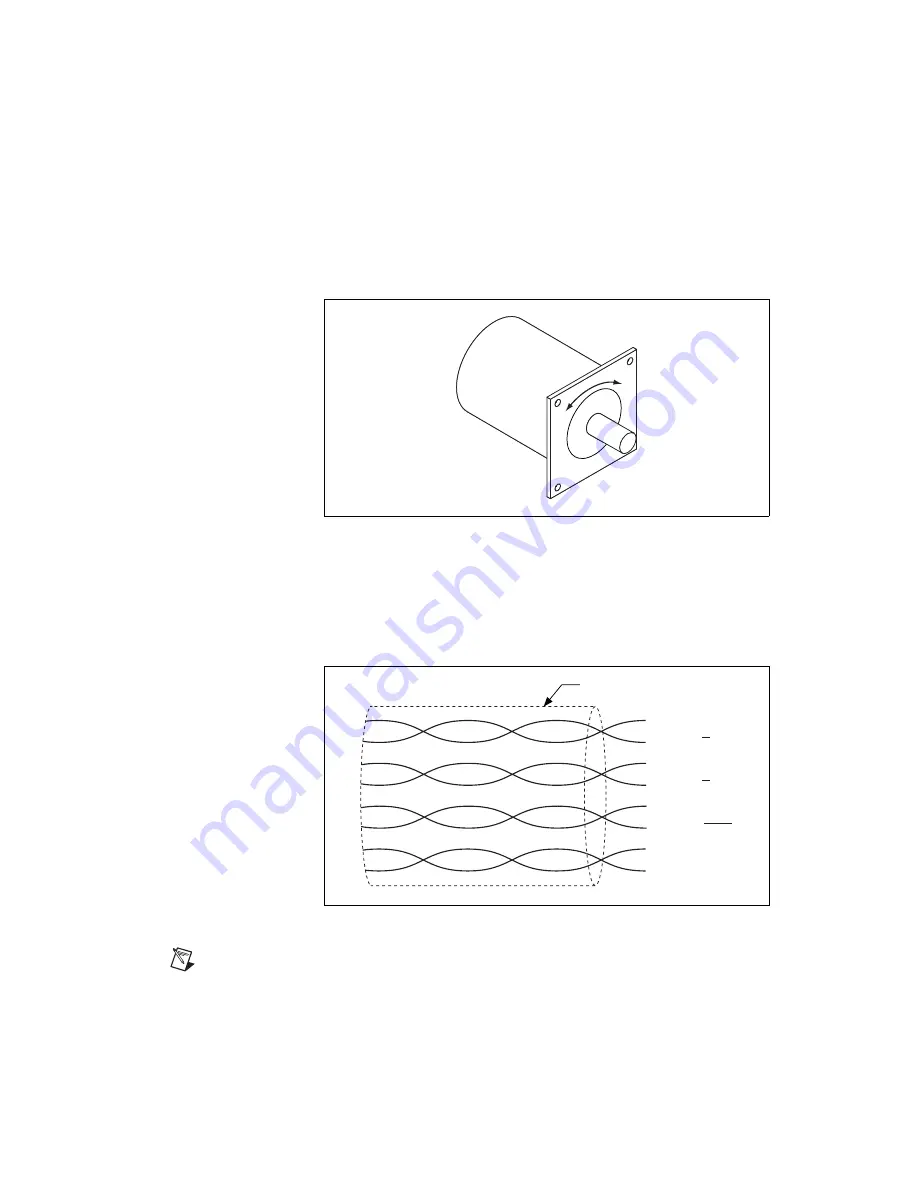
When connecting the encoder wiring to your MID-7604/7602, use shielded
wire of at least 24 AWG. Analog noise filters filter the encoder inputs in the
MID-7604/7602. You must use cables with twisted pairs and an overall
shield for improved noise immunity and enhanced encoder signal integrity.
Figure 9 shows twisted pairs in a shielded cable.
Figure 9.
Shielded Twisted Pairs
Note
If you use an unshielded cable, noise can corrupt the encoder signals, resulting in
lost counts, reduced accuracy, and other erroneous encoder and controller operation.
CCW
CW
Shield
+5 V
Encoder Index
Encoder Index
Encoder B
Encoder B
Encoder A
Drain
Encoder A
Digital
Ground







































































