




























Figure 4.25: Advanced Features
Damper
The NAV SD 's vertical speed calculation is based on air pressure variations. It is very seldom to have
air pressure absolutely stable. Turbulence caused by air moving near the sensor is sucient to cause
small variations in pressure. For this reason the NAV SD lters (averages) the pressure data to prevent
constantly detecting tiny pressure variations. The value that denes how must the pressure is ltered is
the Damper. Setting a lower damper value caused the NAV SD to become more responsive but harsher.
Inversely a higher value causes the NAV SD to be less responsive but smoother. The default value is 6.
Cadence
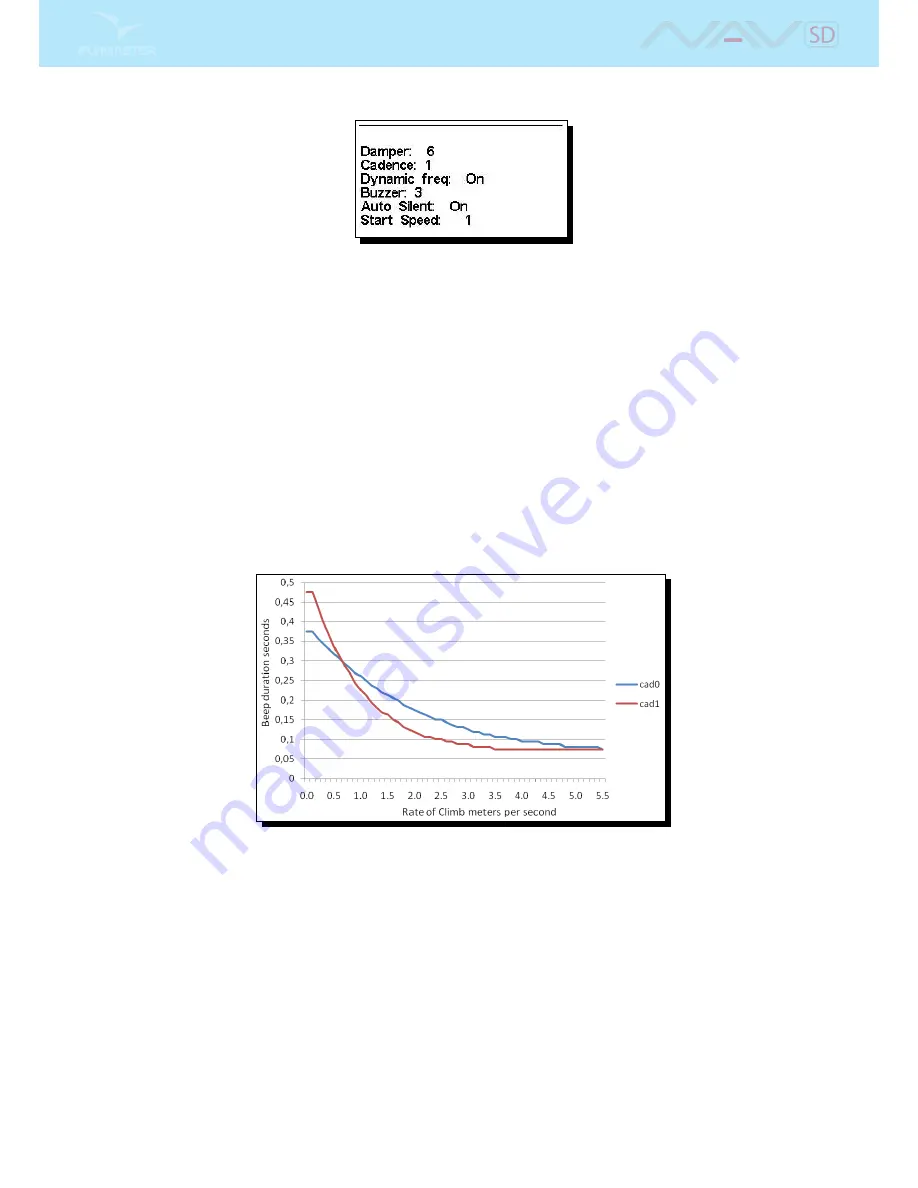
When a rate of climb is higher than that specied by the Climb threshold the NAV SD creates a beeping
sound. The rate (cadence) of the beeps increases as the climb rate increases. This increase in rate is
not linear. The cadence parameter species which cadence curve should be used. Current there are 2
possibilities represented in the graph of Figure
4.26
.
Figure 4.26: Cadence timing
Dynamic Frequency
The NAV SD beeps at a specied pitch (frequency) when a certain rate of climb is encountered. When
dynamic frequency is o, the pitch (frequency) of that beep will remain constant if the rate of climb
changes. With dynamic frequency on, the pitch of the beep may vary if the rate of climb varies during
the individual beep.
Buzzer
Is so called because of the sound it emits, which resembles a buzzing sound.
The buzzer sound is produced when the rate of climb is close to, but has not yet reached the specied
Climb threshold (see 13.3.1). This value is set between 0 and 9 with each unit corresponding to be 0.1 m/s,
ie. 3 is 0.3m/s. Subtracting this decimal value from the climb threshold will give us the value at which
40
Summary of Contents for Flymaster NAV SD
Page 1: ...User manual Version 3 0...
Page 54: ...Figure 4 42 GPS Reset 53...































































