





















CHAPTER 1. MMO-700
1.2. OPERATING ELEMENTS
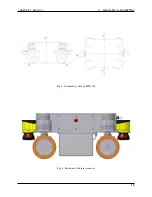
1.2 Operating Elements
Please refer to the corresponding page for the MPO-700:
(page 11).
When installing some options please follow the instructions at
(page 3).
1.3 Changes in Handling
1.3.1 With Radio Emergency Stop System
If the robot is equipped with a radio emergency stop system the reset procedure changes slightly.
1.3.1.1 Starting The Robot
After starting up the robot it is necessary to turn the key switch clockwise once more in order to activate the radio
receiver.
1.3.1.2 Engaging The Radio Connection
1. Pull the red button on the handset upwards to activate the sender.
2. Wait until the two LEDs next to the red button have stopped blinking.
3. Press the green button on the handset to engage the safe connection.
4. Turn the key switch clockwise to reset the safety system and switch to normal operation.
1.3.1.3 Stopping The Robot Remotely
There are four ways to raise an emergency stop remotely:
• Press the red button on the handset. This is the intended operation and can be reset as described above.
• Placing the handset in the charging bay. Whenever the handset is charged in the charging bay it is considered
inaccessible to the operator who might be needing it. Since this would be an unsafe situation the system will
trigger an emergency stop. To reset this remove the handset from the charging bay and follow the steps stated in
the paragraph above.
• The handset’s battery runs out. The radio connection between handset and receiver is constantly maintained as
long as the red button is not in its lower (pressed) position and will drain the battery. If the battery level is too
low to keep up a stable connection the receiver will switch to emergency stop. Please press the red button or
recharge the handset whenever it is not in use.
• The radio connection is interrupted. The connection between handset and receiver can also be lost when the
distance is too big or when the radio signal is dampened or blocked by obstacles like machines or building
structures. In rare cases high electromagnetic noise from big machinery might also cause connection problems.
1.3.2 With Flexi Soft Safety Controller
If the robot features a Flexi Soft safety controller from Sick all safety functions are shifted from the RelayBoard to the
Flexi Soft. In this case the LCD will only report
SCANNER STOP
for all kinds of emergency stop. Please connect to
the Flexi Soft directly to get detailed status information
3







































































