

























CHAPTER 1. MPO-500
1.4. TRANSPORT
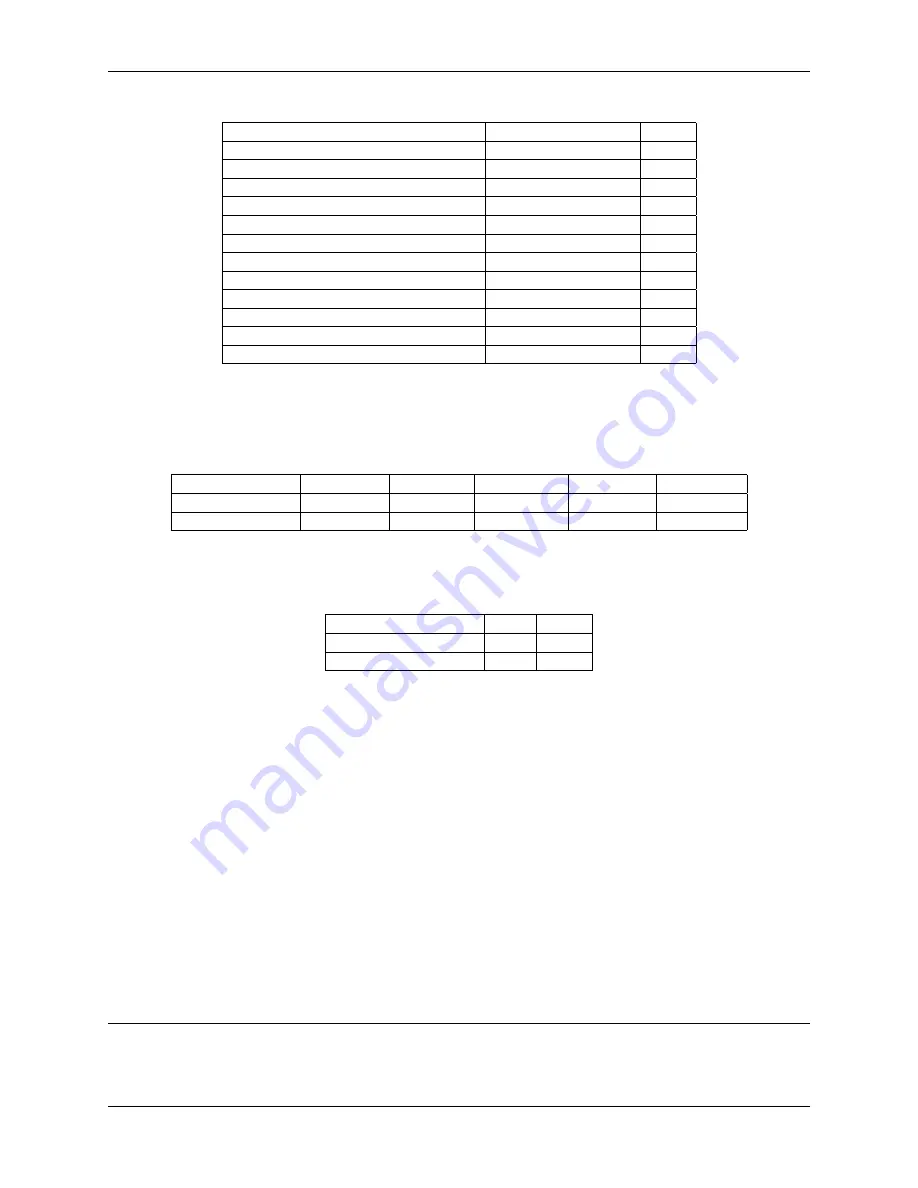
Description
Units
Value
Motor power
W
300
Rated motor speed
rpm
3000
Maximum motor speed
rpm
5000
Possible motor speed (at battery voltage)
rpm
1800
Rated motor torque
Nm
0.95
Maximum motor torque
Nm
1.91
Brake torque (static)
Nm
1.47
Encoder resolution
Increments/Revolution
10000
Gear ratio
1
25:1
Rated battery voltage
V
24
Maximum unregulated voltage
V
29
Battery capacity
Ah
50
1.3.4.2 Metering Capacities of Sensors
All data are taken from the respective datasheets. Distances are measured in meters, angles are measured in degree.
Sensor
Resolution
Min.range
Max. range
Hor. angle
Vert. angle
Laser scanner
0.5°
0
30
±
135
0
Ultrasonic sensors
~
±
0.01 m
0.25
1.5
±
60
±
30
1.3.4.3 Other Properties
Description
Units
Value
Weight
kg
80
Expected working time
a
10
1.3.4.4 Connectors
See chapter
(page 22).
1.4 Transport
1.4.1 Packaging
The mobile robot MPO-500 is packed in a rugged wooden box which can be reused for future transports. If the original
box cannot be used anymore it is recommended to build a new box of similar design.
The base plate of the box has to be strong enough to carry the robot and to take asymmetric forces, e.g. when
moving the box with a forklift. When packing the robot it has to be secured against unintended slipping by sufficient
cushioning. In order to prevent dust and dirt from the cushioning material to enter the robot, the maintenance opening
should be closed and all connectors should be fastened or covered prior to packing the robot.
Tip:
Depending on the cushioning material it might be advisable to protect the brake release button against unintended
activation. If this button is pressed during transport, the robot may move inside the box and the batteries might get
8






































































