





























48
1.5.5 Challenge exercise – Along two lines
Task 1: Prepare two black lines as follows:
Put an obstacle on the inner line and let the SENSE move along this
line.
When it meets the obstacle, it moves to the outer line and goes along it.
1.5.6 Movement along a wall
To move the SENSE along a wall, we use the same algorithm of moving the
SENSE along a black line. We use the slow turn procedures.
In the main program, we use the
If
instruction to make the movement according
to the following algorithm:
Turn left when the SENSE is too close to the wall.
Turn right when the SENSE is far from the wall.
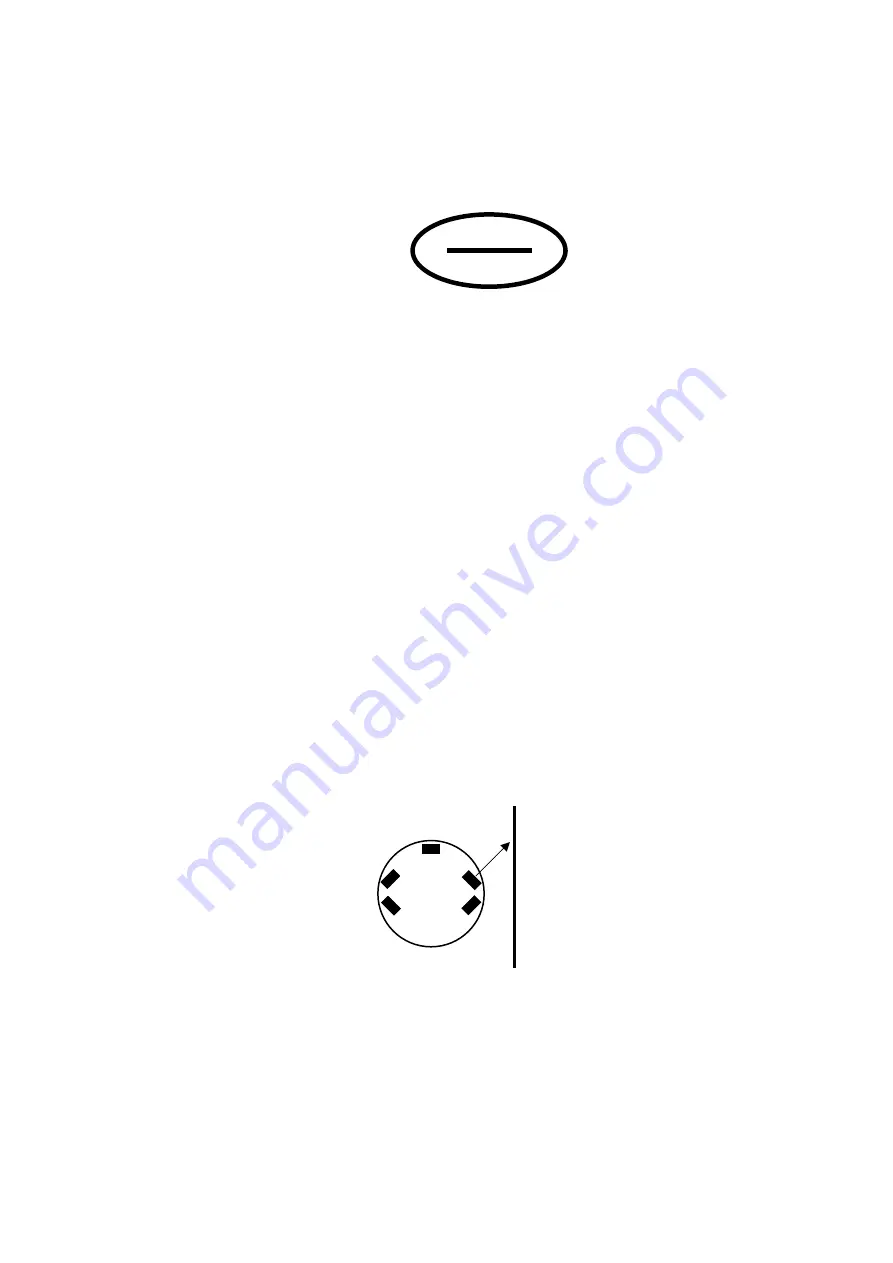
To go along a wall on the right, we use the front side range sensor.
The side range sensors are installed in 45
o
to the SENSE base.
When the SENSE turns to the right, the measured distance is smaller than when
it turns to the left.
Think what will happen if the range sensor is parallel to the wall.
Summary of Contents for Sense Autonomous
Page 1: ...Sense Autonomous...
Page 2: ......
Page 4: ......
Page 31: ...25 Before starting the experiment print two black lines as follows...
Page 89: ......
Page 90: ......







































































