





























Setting Up The Unit
Types of Machine Error
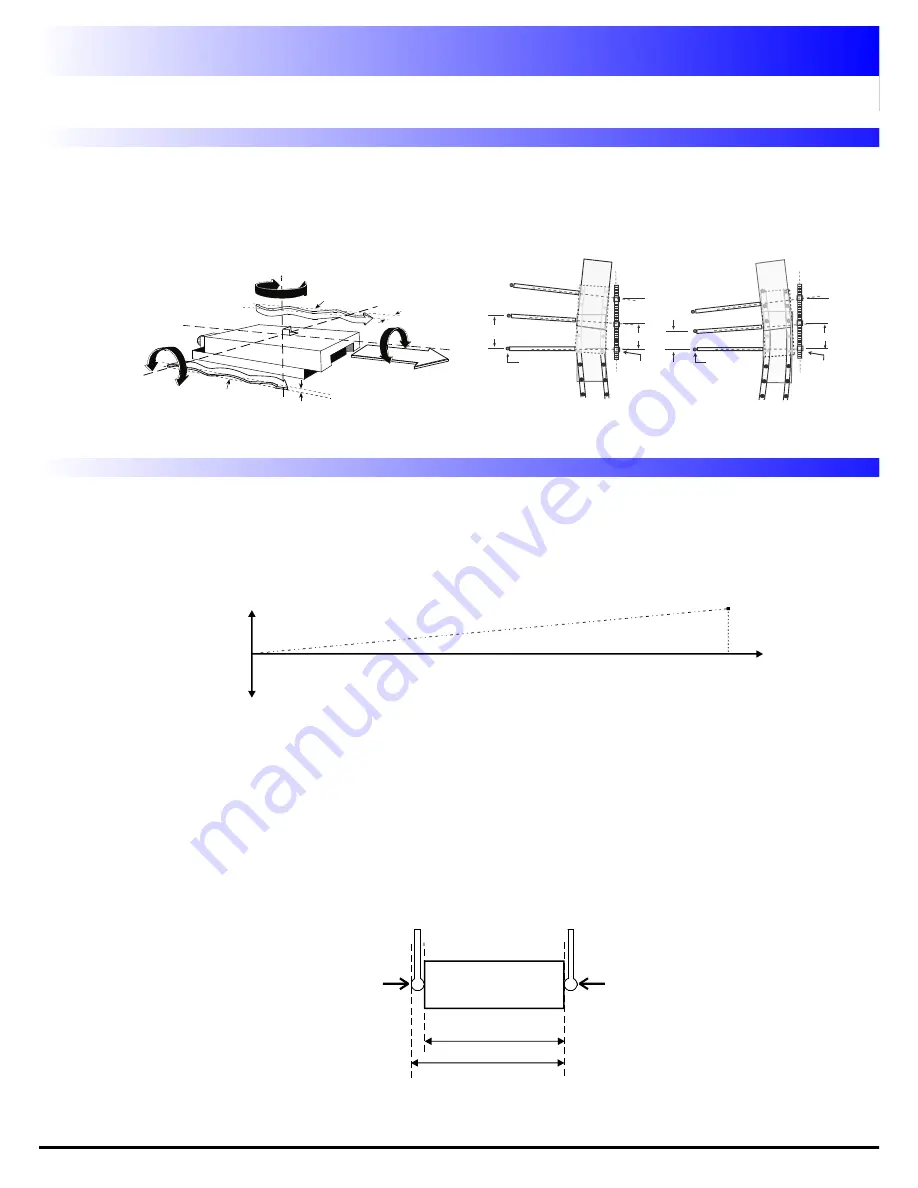
There are many types of machine error, including pitch, roll, yaw, flatness, straightness, and Abbé error.
The diagrams below demonstrate these errors.
Way errors
Pitch
Axis
Yaw
Axis
Typical Yaw
Deviation
Straightness
Roll Axis
Travel
Flatness
Typical Pitch
Deviation
14
Linear Error Compensation
In this mode, a single constant correction factor is applied for each axis to all displayed measure-
ments. The correction factor is calculated, and specified in parts per million (ppm).
In this mode a single constant correction factor for each axis is applied to all displayed measurements.
As you follow the procedure ensure that you approach each edge from opposite directions, then
subtract the width of the tool from the value displayed on the DP1200. The DP1200 Automatically takes
into account the probe diameter as per setting (Linear Only).
(Fig 1)
Abbé error
A
B
C2
C2
B2
A2
B1
C1
B1
A1
C1
A1
Shown with encoder on
concave
side
of bearing path
Shown with encoder on
convex
side of
bearing path
greater than
End Effector
Linear
encoder
Encoder
End Effector
Linear
encoder
Encoder
less than
encoder
Error
Travel
Tool or
Probe
standard distance
measured distance
Summary of Contents for dp1200
Page 1: ...User Manual DP1200 Digital Readout...
Page 2: ......







































































