




























EDH0162En1040 – 06/99
4.6
MM4005
Motion Control Tutorial
4.2.4
Local Accuracy
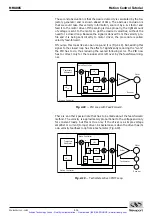
For some applications, it is important to know not just the positioning
Accuracy over the entire travel but also over a small distance. To illustrate
this case, Fig. 4.3-a and Fig. 4.3-b show two extreme cases.
Fig. 4.3-a
— High Accuracy for Small Motions.
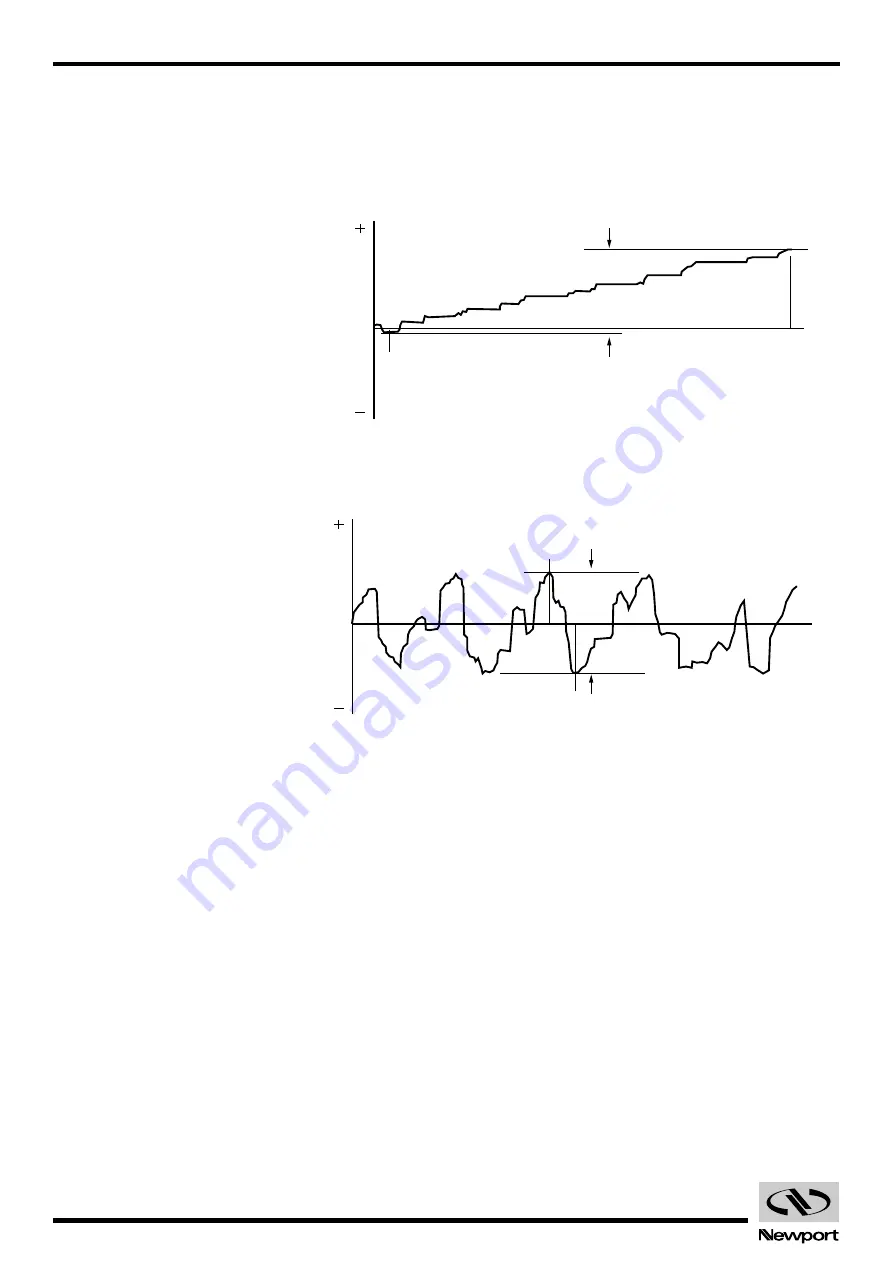
Fig. 4.3-b
— Low Accuracy for Small Motions.
Both error plots from Fig. 4.3-a and Fig. 4.3-b have a similar maximum
Error. But, if you compare the maximum Error for small distances, the sys-
tem in Fig. 4.3-b shows significantly larger values. For application requires
high accuracy for small motions, the system in Fig. 4.3-a is definitely pre-
ferred.
“Local Error” is a relative term that depends on the application; usually no
Local Error value is given with the system specifications. The user should
study the error plot supplied with the motion device and determine the
approximate maximum Local Error for the specific application.
4.2.5
Resolution
Resolution is the smallest motion that the controller attempts to make. For
all DC motor and all standard stepper motor driven stages supported by
the MM4005, this is also the resolution of the encoder.
Keeping in mind that the servo loop is a digital loop, the Resolution can be
also viewed as the smallest position increment that the controller can han-
dle.
A
B
Position
Max. Error
Error
0
A
B
Position
Max. Error
Error
0
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































