





























EDH0162En1040 – 06/99
4.8
MM4005
Motion Control Tutorial
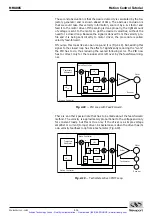
Fig. 4.6
— Error vs Motion Step Size.
Fig. 4.6 shows an example of such a plot. The graph represents the maxi-
mum relative error for different motion step sizes. In this example, the
Minimum Incremental Motion that can be reliably performed with a maxi-
mum of 20% error is one equivalent to 4 resolution (encoder) increments.
4.2.7
Repeatability
Repeatability is the positioning variation when executing the same motion
profile. Assuming that we have a motion sequence that stops at a number
of different locations, the Repeatability is the maximum variation in posi-
tion all targets when the same motion sequence is repeated a large number
of times. It is a relative, not absolute, error between identical motions.
4.2.8
Backlash (Hysteresis)
For all practical purposes, Hysteresis and Backlash have the same meaning
for typical motion control systems. The term Hysteresis has an electro-
magnetic origin while Backlash comes from mechanical engineering. Both
describe the same phenomenon: the error caused by approaching a point
from a different direction.
All parameters discussed up to now that involve the positioning Error
assumed that all motions were performed in the same direction. If we try to
measure the positioning error of a certain target (destination), approaching
the destination from different directions could make a significant differ-
ence.
In generating the plot in Fig. 4.2 we said that the motion device will make a
large number of incremental moves, from one end of travel to the other. If
we command the motion device to move back and stop at the same loca-
tions to take a position error measurement, we would expect to get an iden-
tical plot, superimposed on the first one. In reality, the result could be
similar to Fig. 4.7.
Motion step size (in resolution increments)
Relative Error
100%
80%
60%
40%
20%
1 2 3 4 5 6 7 8 9
10 11
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































