



























EDH0162En1040 – 06/99
4.18
MM4005
Motion Control Tutorial
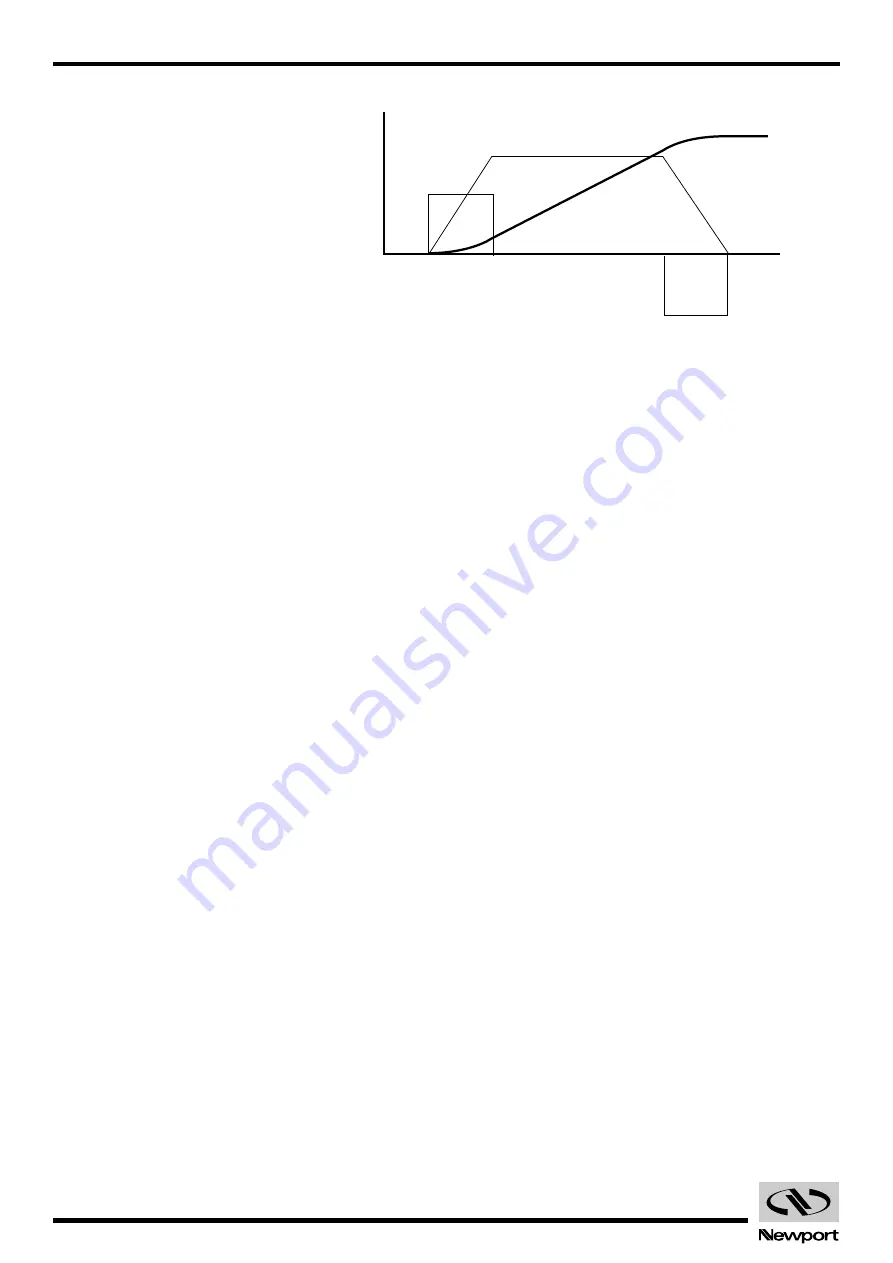
Fig. 4.21
— Position and Acceleration Profiles.
Besides the destination, the acceleration and the velocity of the motion
(the constant portion of it) can be set by the user before every move com-
mand. Advanced controllers like the MM4005 allow the user to change
them even during the motion. However, the MM4005 always verifies that a
parameter change can be safely performed. If not, the command is ignored
and the motion continues as initially defined.
4.4.2
Jog
When setting up an application, it is often necessary to move a devices
manually while observing motion. The easy way to do this without resort-
ing to specialized input devices such as joysticks or track-wheels is to use
simple push-button switches. This type of motion is called a jog. When a
jog button is pressed the selected axis starts moving with a pre-defined
velocity. The motion continues only while the button is pressed and stops
immediately after its release.
The MM4005 offers two jog speeds. The high speed is programmable and
the low speed is ten times smaller. The jog acceleration is also ten times
smaller than the programmed maximum acceleration values.
4.4.3
Home Search
Home search is a specific motion routine that is useful for most types of
applications. Its goal is to find a specific point in travel relative to the
mounting base of the motion device very accurately and repeatably. The
need for this absolute reference point is twofold. First, in many applica-
tions it is important to know the exact position in space, even after a
power-off cycle. Secondly, to protect the motion device from hitting a trav-
el obstruction set by the application (or its own travel limits), the con-
troller uses programmable software limits. To be efficient though, the
software limits must be placed accurately in space before running the
application.
To achieve this precise position referencing, the MM4005 motion control
system executes a unique sequence of moves.
First, lets look at the hardware required to determine the position of a
motion device. The most common (and the one supported by the MM4005)
are incremental encoders. By definition, these are encoders that can tell
only relative moves, not absolute position. The controller keeps track of
position by incrementing or decrementing a dedicated counter according
to the information received from the encoder. Since there is no absolute
position information, position “zero” is where the controller was powered
on (and the position counter reset).
Position
Acceleration
Time
Desired Velocity
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































