



























EDH0162En1040 – 06/99
4.28
MM4005
Motion Control Tutorial
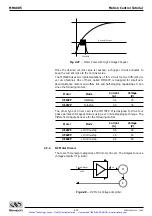
This torque diagram is accurate even when the motor is driven with half-,
mini- or micro-steps. The maximum torque is still one full step away from
the stable (desired) position. When mini- and micro-stepping motors are
used in open-loop applications there is inherent error, but advanced con-
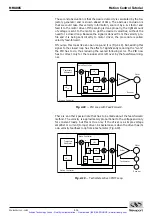
trollers like the MM4005 can control the stepper motors with closed loop
operation to eliminate this problem.
4.6.1.1
Advantages
Stepper motors are primarily intended to be used for low cost, micro-
processor controlled positioning applications. Due to some of their inher-
ent characteristics, they are preferred in many industrial and laboratory
applications. Some of their main advantages are:
• Low cost full-step, open loop implementation.
• No servo tuning required.
• Good position lock-in.
• No encoder necessary.
• Easy velocity control.
• Retains some holding torque even with power off.
• No wearing or arcing commutators.
• Preferred for vacuum and explosive environments.
4.6.1.2
Disadvantages
Some of the main disadvantages of the stepper motors are:
• Could loose steps (synchronization) in open loop operation.
• Requires current (dissipates energy) even at stop.
• Generates higher heat levels than other types of motors.
• Moves from one step to another are made with sudden motions.
• Large velocity ripples, especially at low speeds, causing noise and possi-
ble resonances.
• Load torque must be significantly lower than the motor holding torque
to prevent stalling and missing steps.
• Limited high speed.
4.6.2
DC Motors
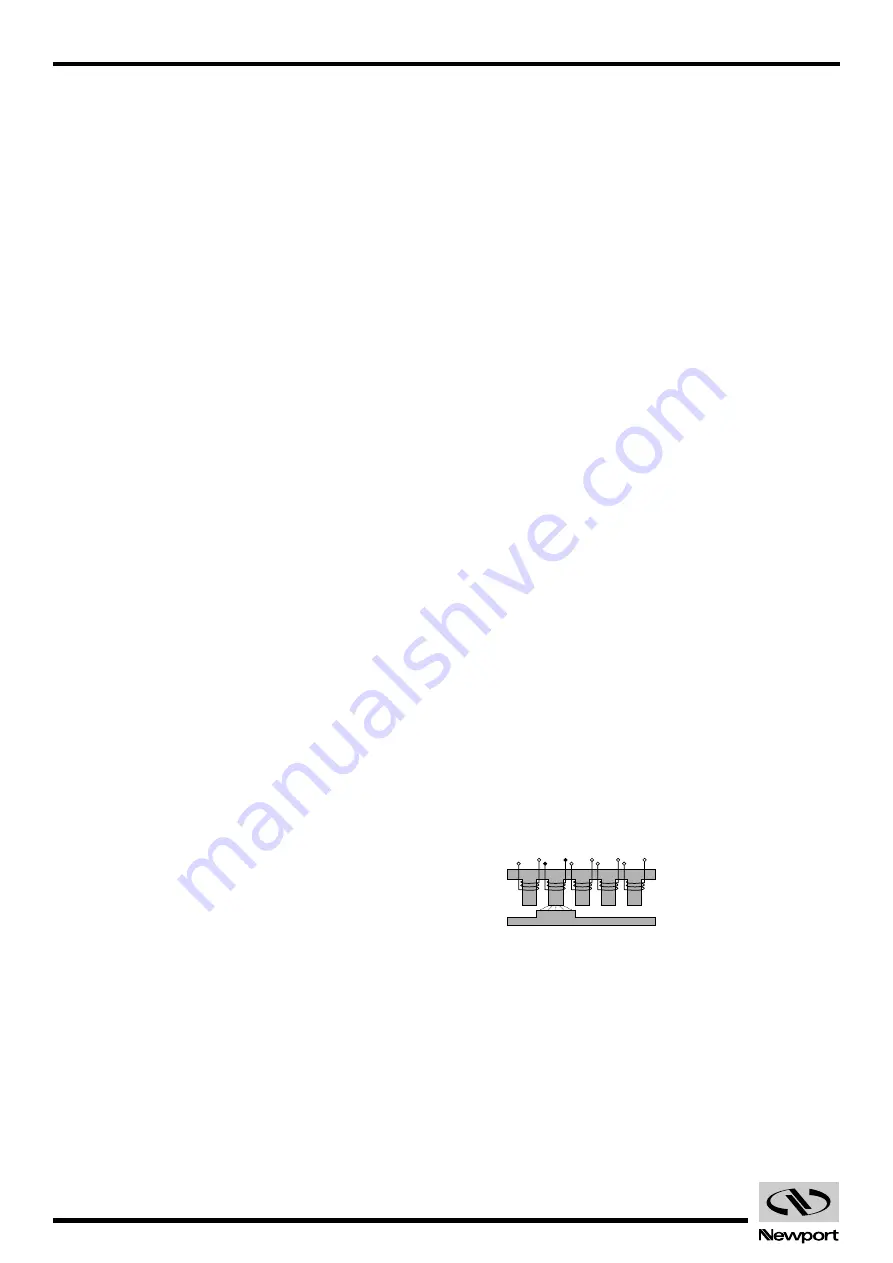
A DC motor is similar to a permanent magnet stepper motor with an added
internal phase commutator (Fig. 4.43).
Fig. 4.43
— DC Motor.
Applying current to phase B pulls in the rotor pole. If, as soon as the pole gets
there, the current is switched to the next phase (C), the rotor will not stop but
continue moving to the next target. Repeating the current switching process
will keep the motor moving continuously. The only way to stop a DC motor is
not to apply any current to its windings. Due to the permanent magnets,
reversing the current polarity will cause the motor to move in the opposite
direction.
Of course, there is a lot more to the DC motor theory but this description
gives you a general idea on how they work. A few other characteristics to
N
S
A
B
C
D
E
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































