

























62
Constants related to dynamic brake function
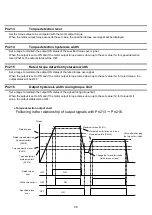
Pn240
Selection of dynamic brake function after stopping
Select the dynamic brake function after stopping.
The relationship between set value, operation state and forced brake ON command is shown in the following table.
* ALM lamp blinks
Free-run: Free-run state
DB: Dynamic brake state
1. This parameter does not change the DB selection during deceleration.
■ Safeguard constants
Constants related to safeguards
Pn245
Selection of overload
Pn246
Overload detection time
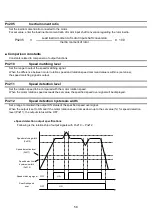
You can select the method of overload detection by Pn245.
0: Electronic thermal method
1: Motor current continuous detection method
Electronic thermal method
You can use this method to expand the available time of overload range as follows.
[Example] In case of 0.75 W
Free-run
Free-run
Free-run
Free-run
Free-run
Free-run
1
0
Normal
bb state
bb2 state
DB
DB
Free-run*
Free-run
Free-run
Free-run
Free-run
Forced brake ON command: ON
bb state
2
DB
Free-run
DB
DB
Free-run
DB
DB
This method is used to detect the overload by estimating the temperature from the actual motor current and thermal
characteristics of the motor.
Free-run
Free-run*
Free-run
Free-run
2. When I8: Free-run stop/error reset input is off (bb state), there will be Free-run state in any setting.
Also, there is no function of DB selection during deceleration since torque generates during deceleration and speed
reduces.
4
3
DB
Free-run
DB
Free-run
Notes
Free-run
Free-run
bb2 state
Normal
Pn240
■ Dynamic brake constant
Forced brake ON command: OFF
Torque (%)
Time
10 seconds
150
200
Available range (0.75 kW)
Current continuous
detection method
Electronic thermal method
3 minute 30 seconds
1 minute 20 seconds
100







































































