





























5 Parameters
BU 0500 EN-1516
119
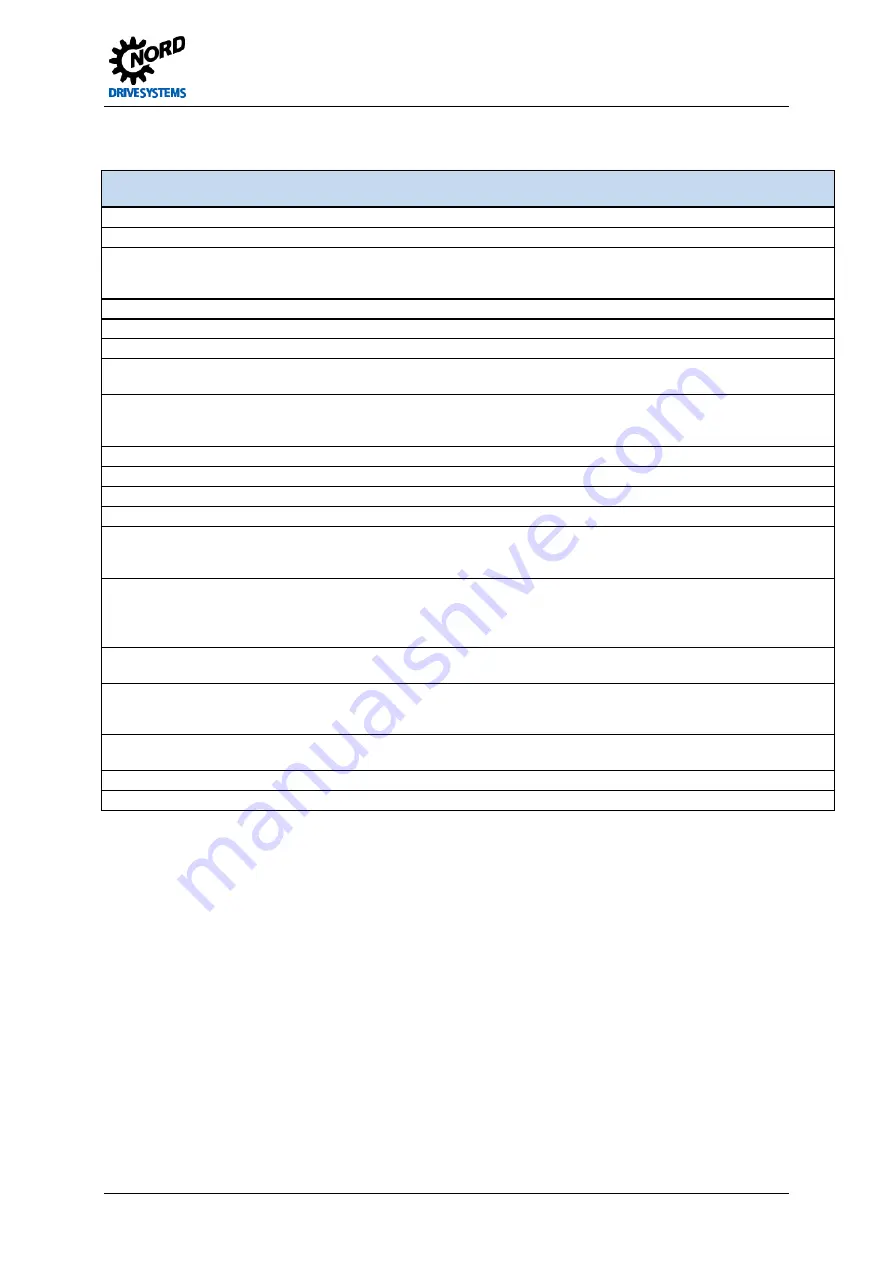
List of possible analog functions of the analog outputs
Valu
e
Function
Description
00
No function
No output signal at terminals.
01
Actual frequency
The analog voltage is proportional to the output frequency of the device
02
Actual speed
Is the synchronous speed calculated by the device, based on the present setpoint value. Load-
dependent speed fluctuations are not taken into account. If Servo mode is being used, the
measured speed will be output via this function.
03
Current
Is the effective value of the output current delivered by the device.
04
Torque current
Indicates the motor load torque calculated by the device. (100 % = P112)
05
Voltage
Is the output voltage delivered by the device.
06
DC link voltage
Is the DC voltage in the device. This is not based on the motor rated data. 10 V Volt, standardised
at 100 %, is equivalent to 450V DC (230 V mains) or 850 Volt DC (480 V mains)!
07
Value of P542
The analog output can be set with parameter P542, regardless of the actual operating status of the
device. With bus control, e.g. an analog value from the control unit can be tunnelled directly to the
analog output of the FI.
08
Apparent power
The actual apparent power of the motor as calculated by the device
09
Effective power
The actual effective power calculated by the device
10
Torque [%]
The actual torque calculated by the device
11
Field [%]
The actual field in the motor, as calculated by the device
12
Actual frequency ±
The analog voltage is proportional to the output frequency of the device, whereby the null point is
shifted to 5 V. For rotation to the right, values between 5 V and 10 V are output, and for rotation to
the left values between 5 V and 0 V.
13
Actual speed ±
This is the synchronous rotation speed calculated by the FI, based on the current setpoint, where
the null point has been shifted to 5 V. For rotation to the right, values from 5 V to 10 V are output
and for rotation to the left, values from 5 V to 0 V.
The measured speed is output via this function if servo mode is used.
14
Torque [%] ±
Is the actual torque calculated by the FI, whereby the null point is shifted to 5 V. For drive torques,
values between 5 V and 10 V are output, and for generator torque, values between 5 V and 0 V.
30
Setpoint freq. before ramp
displays the frequency produced by any upstream controllers (ISD, PID, etc.). This is then the
setpoint frequency for the power stage after it has been adjusted by the acceleration or braking
ramp (P102, P103).
31
Output via BUS PZD
the analog output is controlled via a bus system. The process data is directly transferred (P546,
P547, P548 = 20).
33
Freq. of setpt. source,
"Frequency of setpoint source" (above SW version 1.6)
60
Reserved
(above SK540E
BU 0550)
NOTE:
overview of various setpoints: (please see chapter 8.7 "Standardisation of setpoint / target
Pos: 247 /Anleitungen/Elektronik/FU und Starter/5. Parameter/Parameterauflistung (P000 ...)/P400-P499/Parameter P418 – Liste der digitalen Funktionen der analogen Ausgänge @ 0\mod_1327940847568_388.docx @ 9743 @ 5 @ 1
Summary of Contents for BU 0500
Page 1: ...EN BU 0500 SK 500E Users Manual for Frequency Inverters ...
Page 211: ......
Page 212: ...6075002 3021 ...







































































