37
S
ECTION
8
vehicle movement. Assign units to the parallel
movement in the same way as the main vehicle
movement.
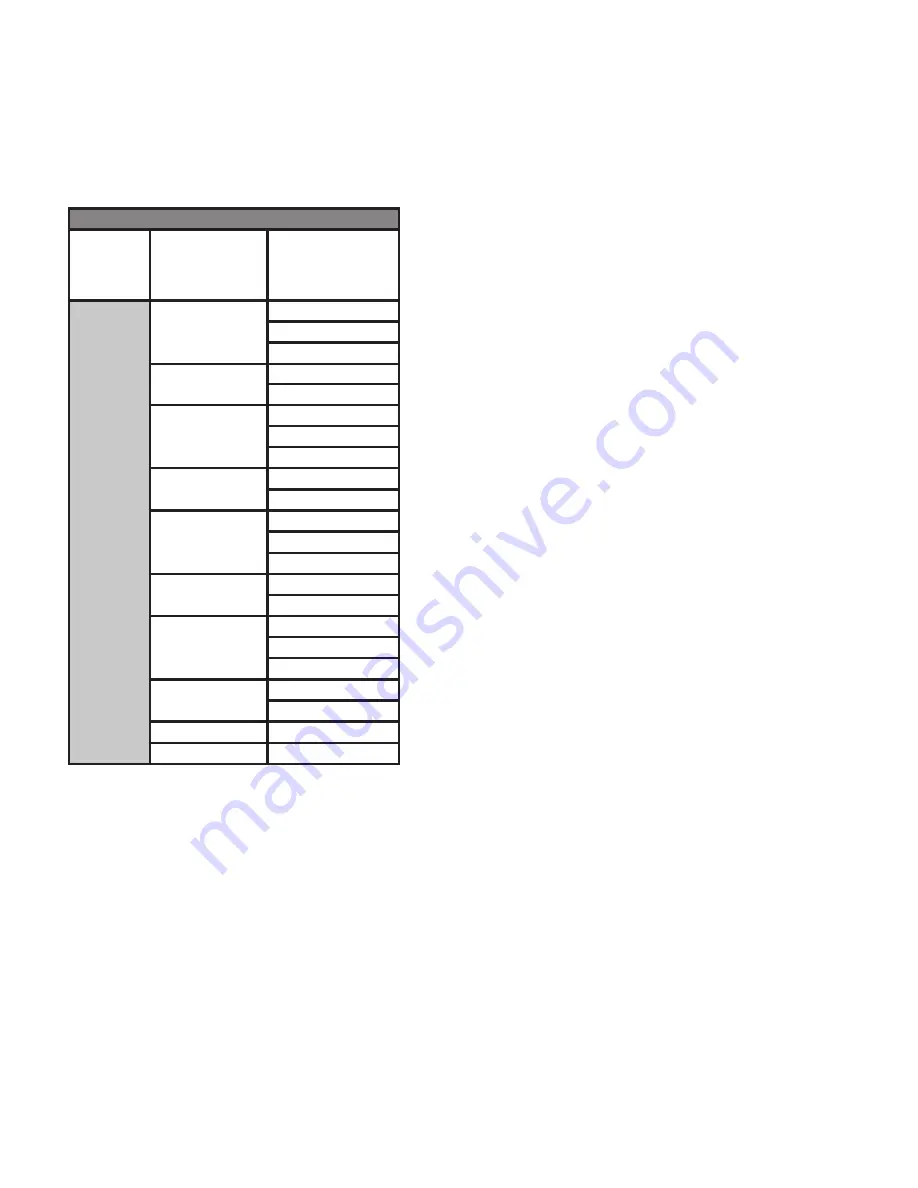
The Editing Phases chart below indicates the
permissable parallel movement for every vehicle
movement.
Edi
Ɵ
ng Phases
APPLY MOVEMENT
APPLY PARALLEL
MOVEMENT
(permissible based on
choice of B column)
DIRECTION
NORTH
SOUTH
NORTH WEST
PED NORTH SOUTH
NORTH WEST
NORTH
SOUTH EAST
SOUTH
NORTH
SOUTH EAST
PED NORTH SOUTH
SOUTH EAST
SOUTH
NORTH WEST
EAST
WEST
EAST NORTH
PED EAST WEST
EAST NORTH
EAST
WEST SOUTH
WEST
EAST
WEST SOUTH
PED EAST WEST
WEST SOUTH
WEST
EAST NORTH
PED N/S
PED N/S
PED E/W
PED E/W
Once a phase has been edited press the BACK
button to save changes and go back to the PHASE
SETTINGS screen.
EDIT PHASE TIMING
Each phase has a column of editable parameters.
To edit, use the arrow buttons to move the cursor
to the desired parameter. Press ENTER to edit
the selection and use the UP and DOWN arrows
to cycle through available options or increase/
decrease timing parameters. Press the BACK or
ENTER button to lock a parameter in memory.
The following parameters can be edited seperately
for each phase (column).
Note: There are two
pages of options and parameters. Use the UP and
DOWN arrow buttons to navigate to both pages.
•
MIN GREEN -
The minimum time in seconds
a phase will remain green. Used only when
actuation is enabled.
•
MAX GREEN -
The maximum time in seconds a
phase will remain GREEN until it returns to RED.
•
YELLOW -
The YELLOW time in seconds
between the transition from GREEN to RED.
•
RED -
The time in seconds phase will be RED
before serving the next phase.
•
PASSAGE (Gap, Extension) -
The amount of
time in seconds added to the green interval for
every vehicle detection that occurs. It begins
counting down when the vehicle detection
(actuation) is removed.
•
CALL -
Parameters that pertain to the use of
actuation. Each available option is de
fi
ned
below.
MIN (Minimum Recall)
- the parameter
causes the controller to place a call for
vehicle service on the phase. The phase
is timed at least for its minimum green,
regardless of whether there is a vehicle
detection event on the movement.
MAX (Maximum Recall)
- the parameter
causes the controller to place a continuous
call for vehicle service on the phase, which
results in displaying the green indication for
its maximum duration every cycle.
RRED (Rest Red)
- When actuation is set
to “rest red” the signal will remain red until
an approaching vehicle is detected. The
fi
rst
approaching vehicle detected will send a
command to the controller and that phase
will become active. If an approaching vehicle
is detected by another traf
fi
c sensor, that
phase will be put in queue until the active
phase is complete. Once all phases are
complete and no further phases are in queue,
all phases will remain red until a vehicle is
detected.
RGRN (Rest Green)
- When actuation is set
to “rest green” it will remain green following
actuation and expiry of the green time, while
the other phase will remain red until a vehicle
is detected. If an approaching vehicle is then
detected by another traf
fi
c sensor, that phase
will be put in queue until the active phase
has reached the minimum green time and
no vehicles are in queue or has reached the
maximum green time, regardless of vehicles
being in queue. The phase with the vehicle
in queue will become active and will remain
green until a vehicle is detected by a traf
fi
c