





























Chapter 4 SPAN Operation
CPT7 and CPT7700 Installation and Operation User Manual v12
76
l
X: -90
l
Y: 0
l
Z: +90
To reach this answer, keep in mind the following rules:
l
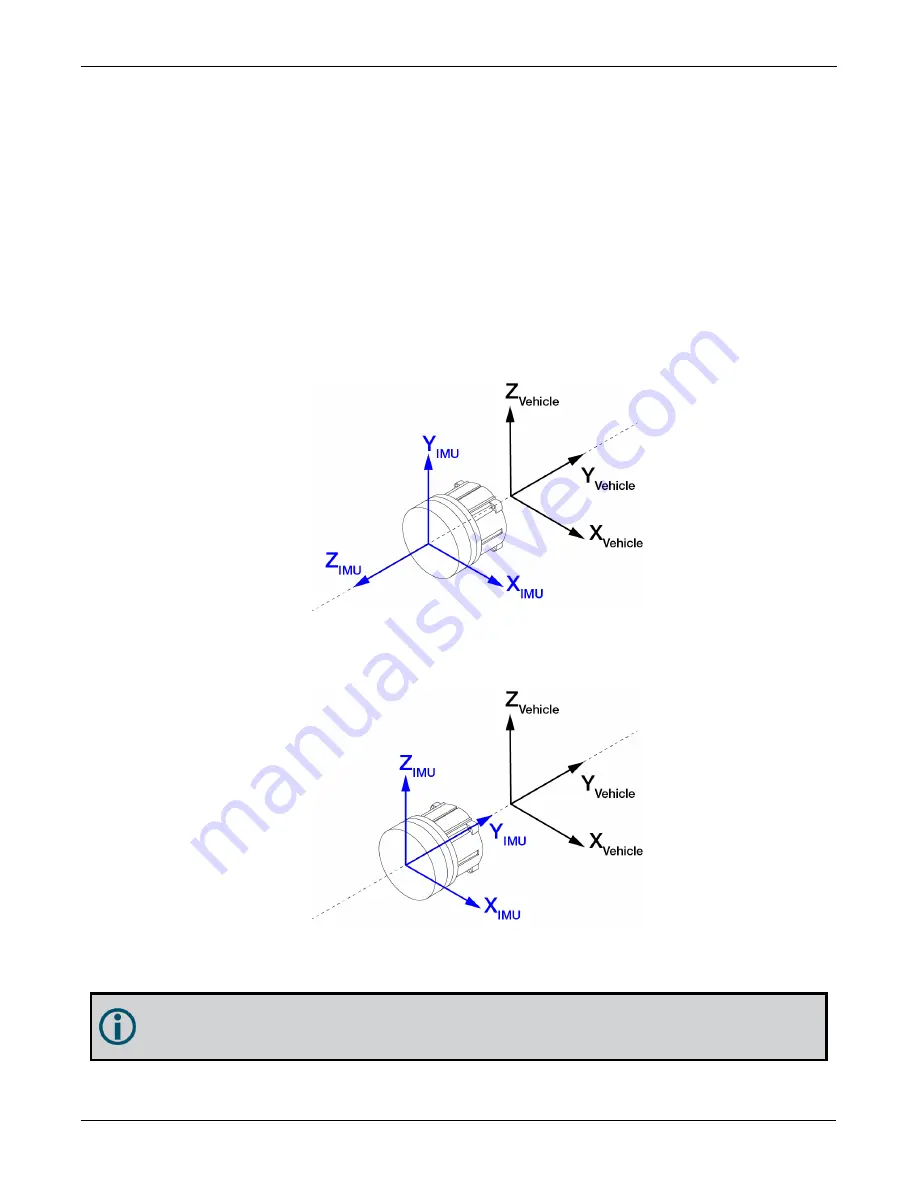
The goal is to rotate the IMU Body frame to be coincident with the Vehicle frame (i.e. IMU X equals Vehicle
X, IMU Y equals Vehicle Y, IMU Z equals Vehicle Z).
l
You must rotate from the IMU Body frame to the Vehicle frame.
l
You must rotate in the order Z, X, Y.
l
Positive rotation is defined according to the right hand rule.
Z Rotation
:
Observe that if a positive 90 degree rotation is performed about the IMU Z axis, the rotated IMU X axis
becomes collinear with the Vehicle X axis.
X Rotation
:
Observe that if a negative 90 degree rotation is performed about the new IMU X axis, the rotated IMU Y axis is
now collinear with the Vehicle Y axis, and the rotated IMU Z axis is also collinear with the Vehicle Z axis.
Y Rotation
:
Since all three sets of axes are already collinear, our frames are coincident, and no further rotation is required.
This solution is not unique. Due to the properties of Euler Angles, there are usually multiple sets of
equivalent rotations.







































































