





























Chapter 4 SPAN Operation
CPT7 and CPT7700 Installation and Operation User Manual v12
79
3. Optionally, use the following command to save the new configuration in Non-Volatile Memory (NVM).
SAVECONFIG
On legacy CPT7s only the 100 Hz IMU data rate is available.
4.3.4 SPAN Configuration for CPT7
l
Minimum Recommended Configuration
l
l
SPAN Configuration with NovAtel Application Suite
l
SPAN Configuration with NovAtel Setup & Monitor (Web)
Minimum Recommended Configuration
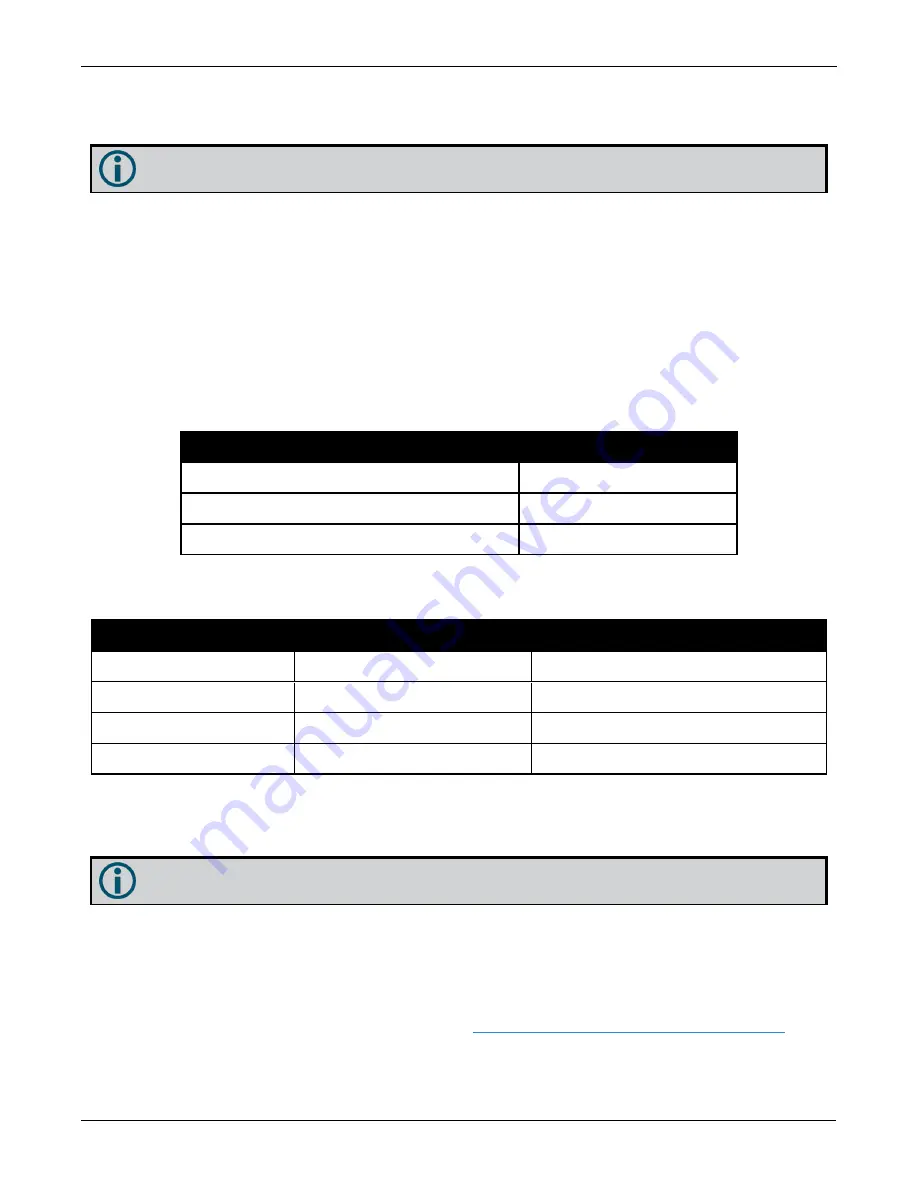
When configuring your CPT7 system for first time use, the following is the minimum amount of information
required to ensure proper operation of a SPAN system.
Required Information
Required Command
IMU to primary antenna lever arm
SETINSTRANSLATION ANT1
IMU to secondary antenna lever arm (
CPT7 only
)
SETINSTRANSLATION ANT2
IMU to vehicle frame rotation
SETINSROTATION RBV
While this is the minimum amount of information required, additional information is typically needed for SPAN
systems. The following commands are commonly used to configure SPAN systems.
Common User Settings
Appropriate Command
Notes
IMU to output position offset
SETINSTRANSLATION USER
Default output position is at the IMU center
IMU to output frame rotation
SETINSROTATION USER
Default output frame is the vehicle frame
Vehicle type
SETINSPROFILE
Minimum alignment velocity
SETALIGNMENTVEL
Configure SPAN Manually
Follow these steps to enable INS as part of the CPT7 system using software commands:
A GNSS antenna with a clear view of the sky must be connected and tracking satellites for operation.
1. Issue the
SETINSTRANSLATION
command, using the
ANT1
parameter, to enter the distance from the
CPT7 to the primary GNSS antenna.
Issue the
SETINSTRANSLATION
command, using the
ANT2
parameter, to enter the distance from the
CPT7 to the secondary GNSS antenna (
CPT7 only
).
See the
SETINSTRANSLATION
command in the
OEM7 Commands and Logs Reference Manual
for
more information.







































































