





























Chapter 4 SPAN Operation
CPT7 and CPT7700 Installation and Operation User Manual v12
73
The IMU body frame is a right-handed coordinate system. The axis markings indicate the positive Z
axis points towards the base of the CPT7.
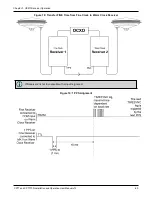
4.1.3 The Vehicle Frame
The definition of the vehicle frame is as follows:
l
z-axis – points up through the roof of the vehicle perpendicular to the ground
l
y-axis – points out the front of the vehicle in the direction of travel
l
x-axis – completes the right-handed system (out the right-hand side of the vehicle when facing forward)
Figure 22: Vehicle Frame
4.1.4 The User Output Frame
The user output frame is an arbitrary frame, which can be optionally defined to transfer inertial output to a
more useful position or reference frame.
By default, SPAN position and velocity output is given at the center of navigation of the IMU. To output position
and velocity at a different location, specify a user offset translation using the
SETINSTRANSLATION
command.
By default, SPAN attitude output is the rotation from the Local-Level frame to the Vehicle frame. If attitude
output is desired relative to another frame, specify a user offset rotation using the
SETINSROTATION
command.
4.2 SPAN Translations and Rotations
A SPAN system combines GNSS and INS into a single system. In a GNSS system, the position is reported
relative to the phase center of the GNSS antenna. In an INS system, the position, velocity and attitude data is
reported relative to the center of navigation of the IMU. For a SPAN system to provide a combined GNSS+INS
position, velocity and attitude, it must know where the GNSS antenna is positioned relative to the IMU.







































































