




























52
OEM6 Family Installation and Operation User Manual Rev 7
Chapter 4
Operation OEM6 Cards and Enclosure
Figure 1: Steadyline Maintain
4.4.2
Transition
When the receiver transitions to a different positioning mode, the position offset is applied to the
calculated position to limit a potential real position jump. The position then slowly transitions to the new
reference position type over a specified period of time. This time period is specified by the Transition time
parameter in the
STEADYLINE
command.
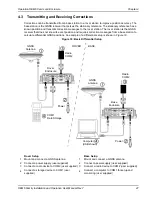
Figure 2: Steadyline Transition
4.4.3
Prefer Accuracy
The positioning mode change depends on the accuracy level of the positioning modes.
When the position mode is changing from a more accurate mode to a less accurate mode (e.g., changing
from RTK to GLIDE), the receiver uses the Maintain option.
When the position mode is changing from a less accurate mode to a more accurate mode (e.g., GLIDE to
RTK), the receiver uses the Transition option.
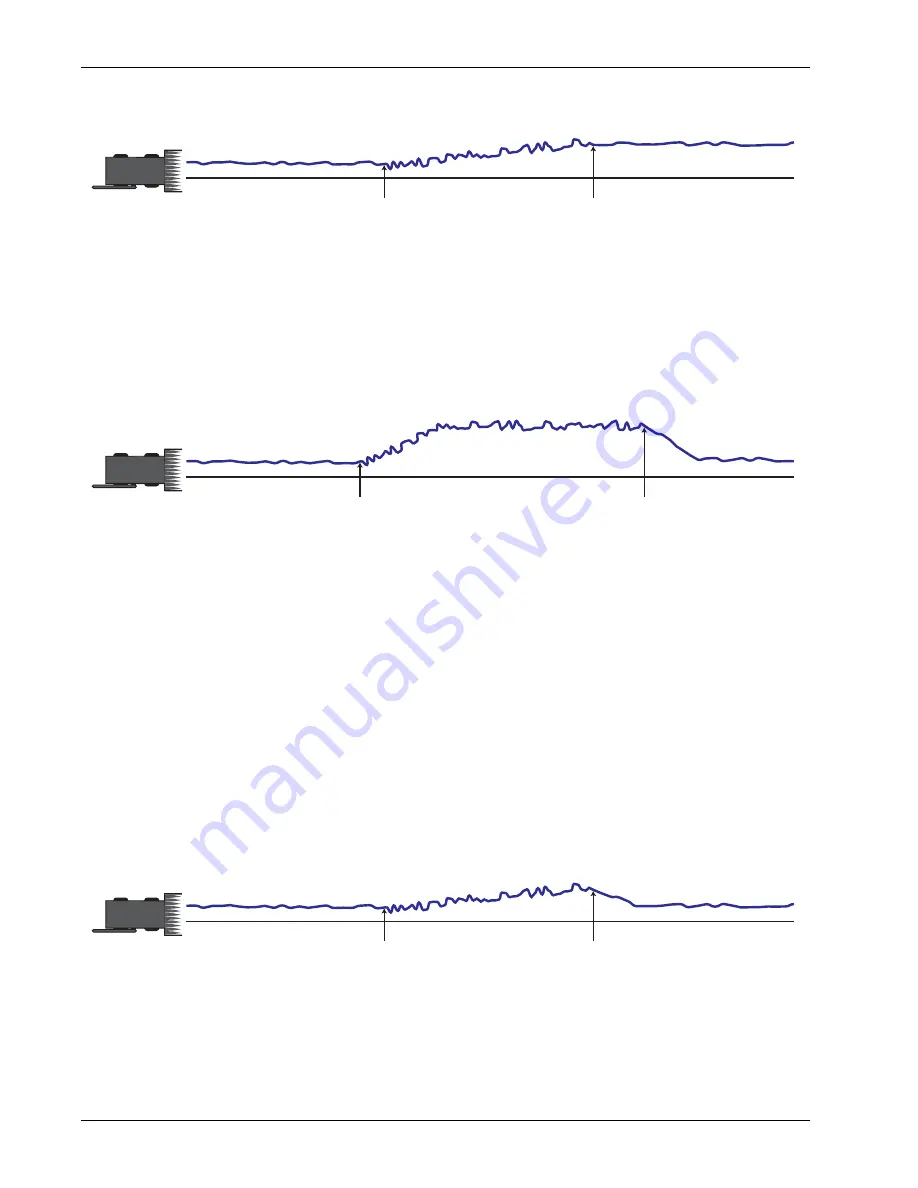
For example, a receiver is configured to do both RTK and GLIDE. If this receiver has a fixed RTK position
and experiences a loss of correction data causing the loss of the RTK solution it will immediately apply
the offset between the two position modes and uses the GLIDE position stability to maintain the previous
trajectory. Over time the GLIDE (or non-RTK) position will experience some drift. Once the RTK position
is achieved again the receiver will start using the RTK positions for position stability and will slowly
transition back to the RTK positions at a default rate of 0.005 m/s or the time specified in the
STEADYLINE
command.
Figure 3: Steadyline Prefer Accuracy
Position
Intended Path
change to
lower accuracy
solution
change to
higher accuracy
solution
Position
Intended Path
change to
lower accuracy
solution
change to
higher accuracy
solution
Position
Intended Path
change to
lower accuracy
solution
change to
higher accuracy
solution







































































