





























214
SPAN-SE User Manual Rev 1
Appendix C
Data Logs
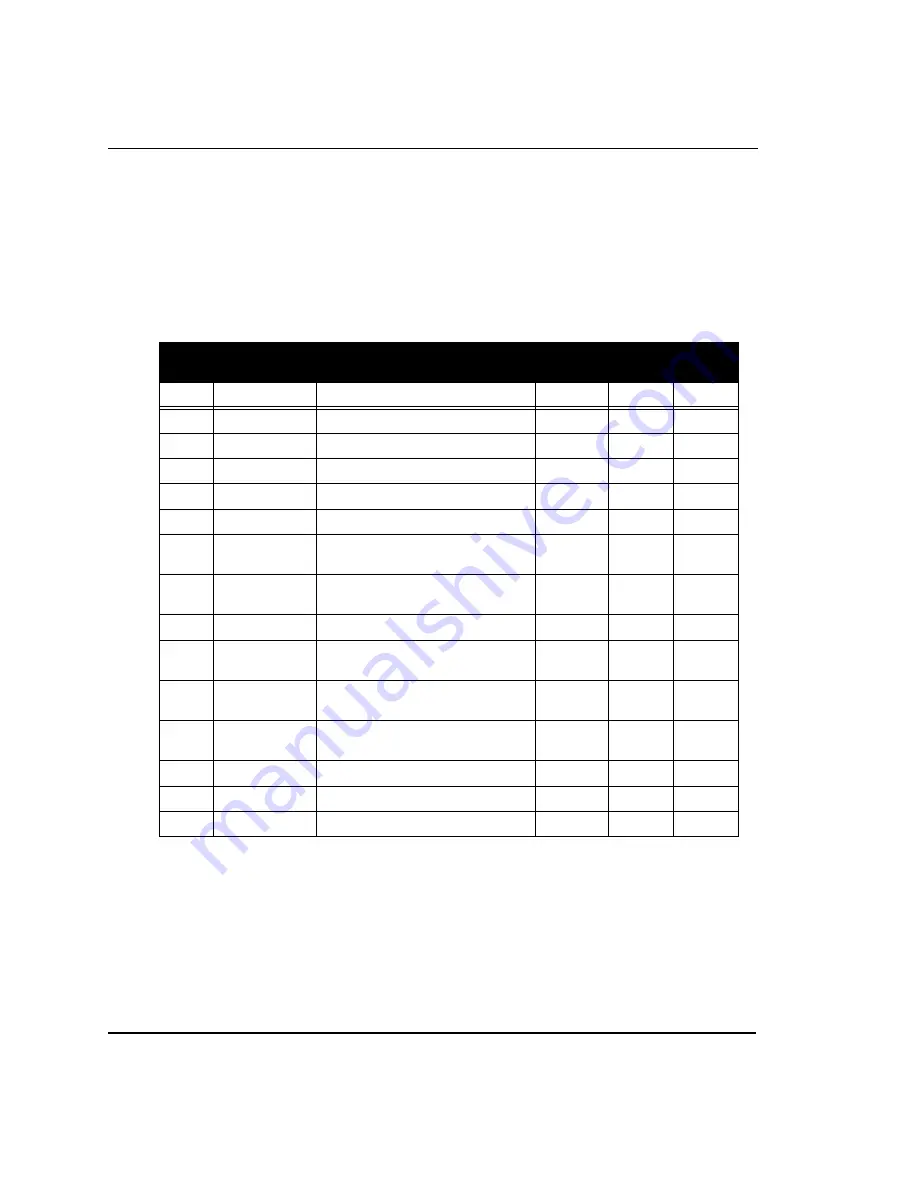
C.4.26 INSPVA
INS Position, Velocity and Attitude
This log allows INS position, velocity and attitude to be collected in one log, instead of using three
separate logs. The attitude is of the SPAN computation frame by default. See the INSATT log, on
, for an explanation of how the SPAN frame may differ from the IMU enclosure frame. The
attitude can be output in the vehicle frame as well. See the APPLYVEHICLEBODYROTATION
Structure:
Message ID: 507
Log Type: Synch
Recommended Input:
log inspvaa ontime 1
ASCII Example:
#INSPVAA,COM1,0,31.0,FINESTEERING,1264,144088.000,00040000,5615,1541;
1264,144088.002284950,51.116827527,-114.037738908,401.191547167,
354.846489850,108.429407241,-10.837482850,1.116219952,-3.476059035,
7.372686190,INS_ALIGNMENT_COMPLETE*af719fd9
Field
Field Type
Description
Format
Binary
Bytes
Binary
Offset
1
Log Header
Log header
-
H
0
2
Week
GPS Week
Ulong
4
H
3
Seconds
Seconds from week start
Double
8
H+4
4
Latitude
Latitude (WGS84)
Double
8
H+12
5
Longitude
Longitude (WGS84)
Double
8
H+20
6
Height
Ellipsoidal Height (WGS84)
Double
8
H+28
7
North Velocity
Velocity in a northerly direction (a -ve
value implies a southerly direction)
Double
8
H+36
8
East Velocity
Velocity in an easterly direction (a -ve
value implies a westerly direction)
Double
8
H+44
9
Up Velocity
Velocity in an up direction
Double
8
H+52
10
Roll
Right handed rotation from local level
around y-axis in degrees
Double
8
H+60
11
Pitch
Right handed rotation from local level
around x-axis in degrees
Double
8
H+68
12
Azimuth
Left handed rotation around z-axis
Degrees clockwise from North
Double
8
H+76
13
Status
INS Status, see
Enum
4
H+84
14
xxxx
32-bit CRC
Hex
4
H+88
15
[CR][LF]
Sentence Terminator (ASCII only)
-
-
-







































































