





















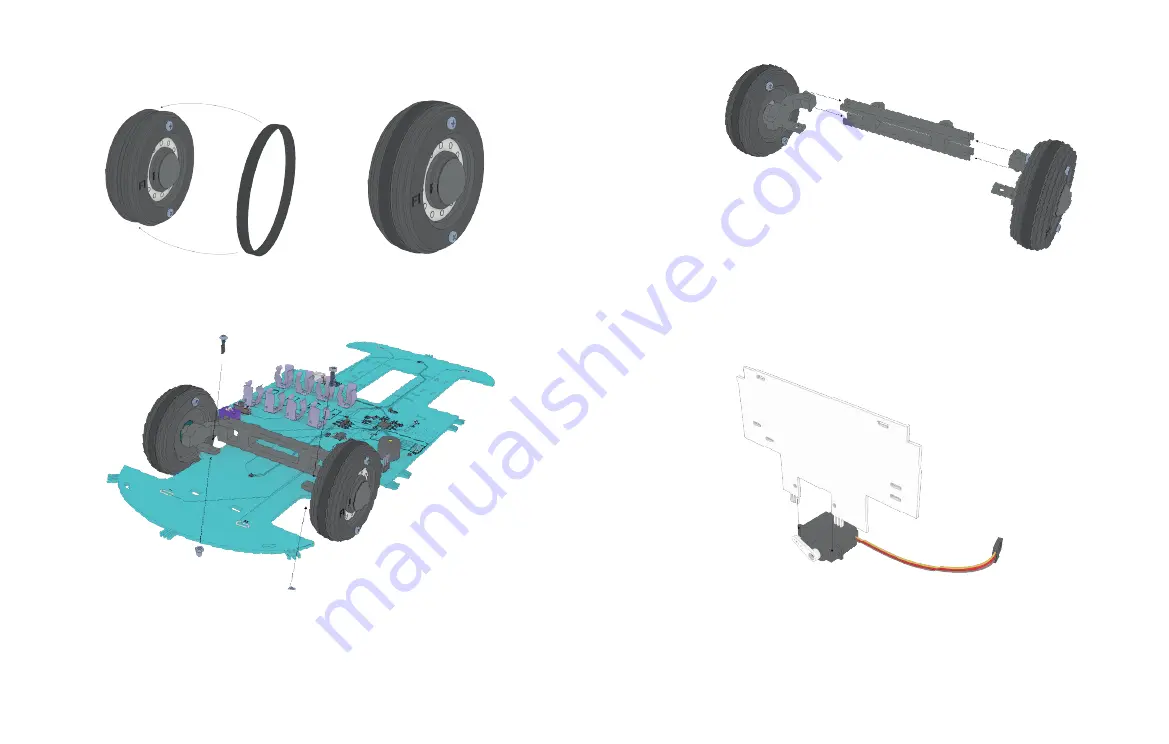
7.
Put the rubber band on the wheel circumference (no. 44).
Insert the wheels assembled in this way into the central
3D printed part (no. 50).
8.
9.
Screw the assembled front wheel mechanism to the chassis
(electronics board with electronics no. 1).
10.
Insert the servo into the hole in part no. 20.






































































