









5
5. Initial setting
Please change parameter setting value of Model EGA driver required according to the conditions to be used.
Use application software
“
MEGATORQUE MOTOR SETUP
”
to set the parameters.
◆
Single phase AC main power
Change
“
System parameter_ID01 : main circuit power input type
”
to
“
01 : AC Single-phase
”
, then connect
AC power line
to terminal R and T of connector CNA.
◆
CN1 I/O signal configuration
The pin-out arrangement and polarity of signals from CONT1 to CONT8 can be changed by setting of
parameter
“
Gr.9_Function enabling condition settings
”
, and pin-out arrangement of signals from OUT1 to OUT8
can be changed by
“
Gr.A_General output terminal output condition / Monitor output selection / Serial
communication settings
”
.
Input signals
“
Gr.9_ID00:CW Over Travel function(F-OT)
”
,
“
Gr.9_ID01:CCW CW Over Travel
function(R-OT)
”
, and
“
Gr.9_ID42:Emergency Stop Function(EMR)
”
are normal close polarity input as
shipping set.
To enable motor operation, wire these input signals properly, or change its polarity by parameter setting value.
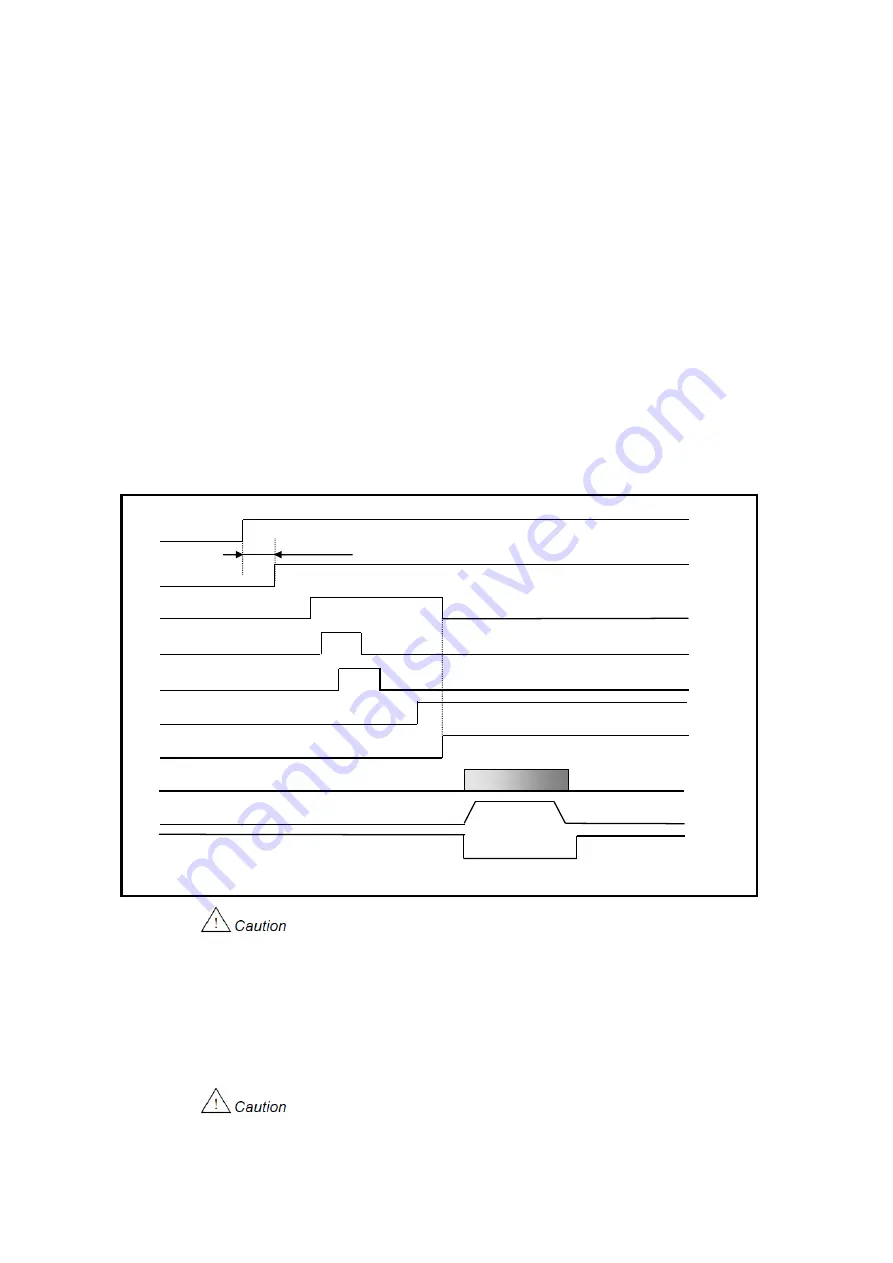
6. Operation sequence
0 msec (Min)
Control source
Main circuit power
Magnetic Pole Position Estimation
ready signal (output)
Magnetic Pole Position Estimation
input signal (input)
Magnetic Pole Position Estimation
end signal (output)
Servo On signal (input)
Motor speed
Operation set up completion signal (output)
Pulse command
In Position window (output)
:
The magnetic pole position estimation must be conducted everytime when
power is turned on.
Magnetic pole position estimation will cause the motor rotation reciprocally
maximum of +/-18 degree.
Do not apply external and/or unbalanced force to the motor to complete
magnetic pole position estimation process properly.
Start motor operation after completion of magnetic pole estimation process.
:
Install external Home sensor if homing operation is required.
Motor incorporates incremental sensor, no absolute sensor is incorporated.







































































