
























10
USER MANUAL
Procedure for adjusting the ground clearance of the T-MOOV robot
The T-Moov has two ground clearance heights: A high and a low position. With the high position, the robot is better able
to travel over uneven litter, or other bumpy surfaces. The low position is preferable for passing under fixed obstacles
such as feed chains on legs.
The adjustment is done with only three tools:
-
a 19mm socket wrench for the wheels
-
a 30 mm torx wrench for the shell
-
a 20 mm torx wrench for the hubs
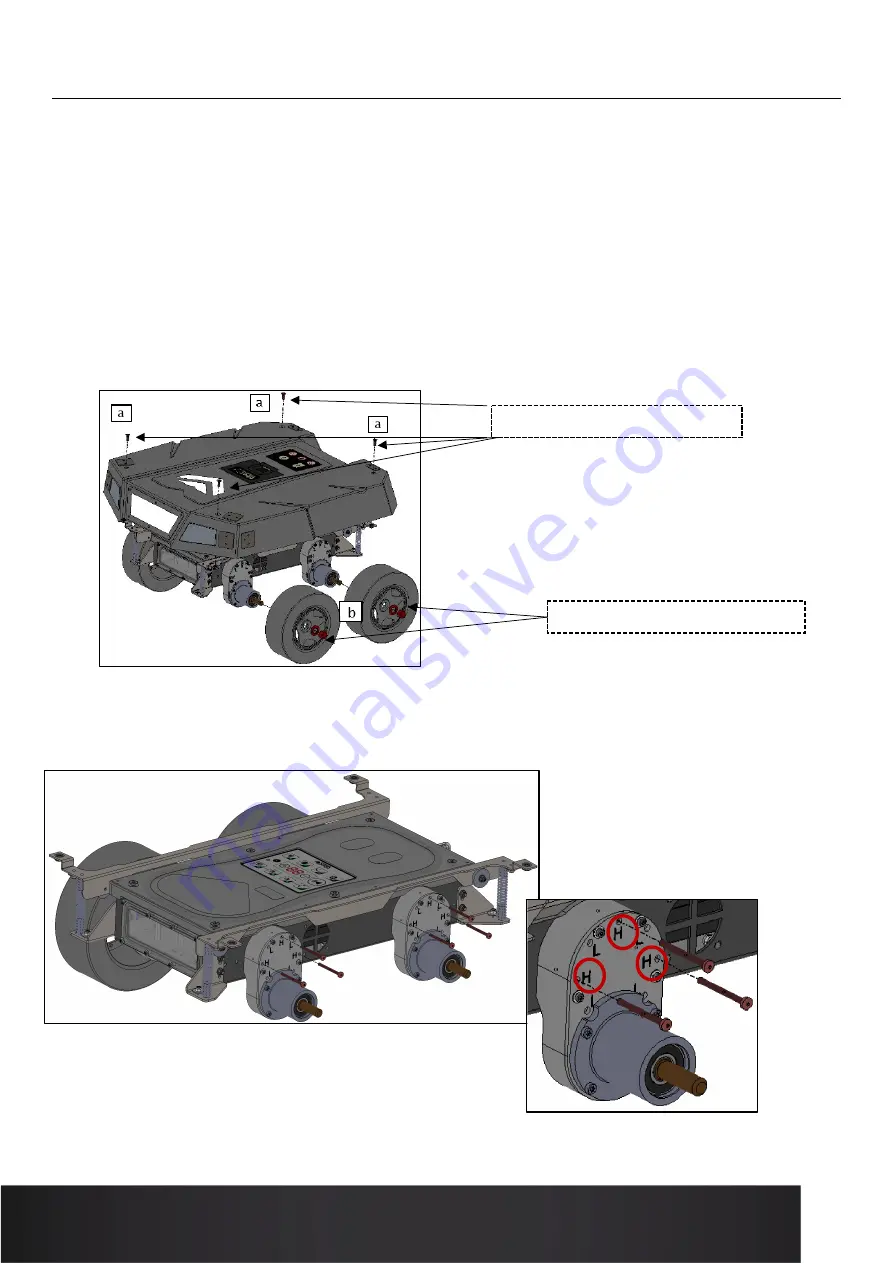
1) Removing the shell and wheels
a. First, remove the four screws that hold the shell in place (
a
)
b.
Then remove the four nuts that hold the wheels (
b
)
2) Adjust the height of the four hubs to the desired working height.
a. Highest ground clearance height (H)
30 mm torx tip - 4 screws
19 mm socket wrench - 4 nuts
Zoom
Summary of Contents for T-MOOV
Page 1: ...1 USER MANUAL MANUEL D UTILISATION...
Page 11: ...11 USER MANUAL b Lowest ground clearance height L Zoom...
Page 25: ...25 USER MANUAL NOTES...
Page 26: ...26 USER MANUAL NOTES...
Page 27: ...27 USER MANUAL NOTES...
Page 28: ...28 USER MANUAL Version Date Written by Nature of change A Nov 2021 EVI Document created...







































































