
























10
iX3 565 Robot with EtherCAT User’s Manual
22792-000 Rev. A
1.1 Intended Audience
Manual
Description
IO Blox User’s Guide (04638-
000)
Describes the IO Blox product, its connections, and input/out-
put signals.
1.1 Intended Audience
This manual is intended for the following personnel, who must also have knowledge of fact-
ory automation (FA) systems and robotic control methods.
l
Personnel in charge of introducing FA systems.
l
Personnel in charge of designing FA systems.
l
Personnel in charge of installing and maintaining FA systems.
l
Personnel in charge of managing FA systems and facilities.
1.2 Robot Overview
The iX3 565 Robot with EtherCAT is a three-arm parallel robot. Servo motors in the robot base
control movement of the robot platform through mechanical links, arms, and an optional drive
shaft when platform rotation is needed. A tool flange is provided on the bottom of the platform
for mounting end-of-arm tooling.
Servo and other control functions are provided with an integrated controller (iCS-ECAT) that is
mounted on the top of the robot base.
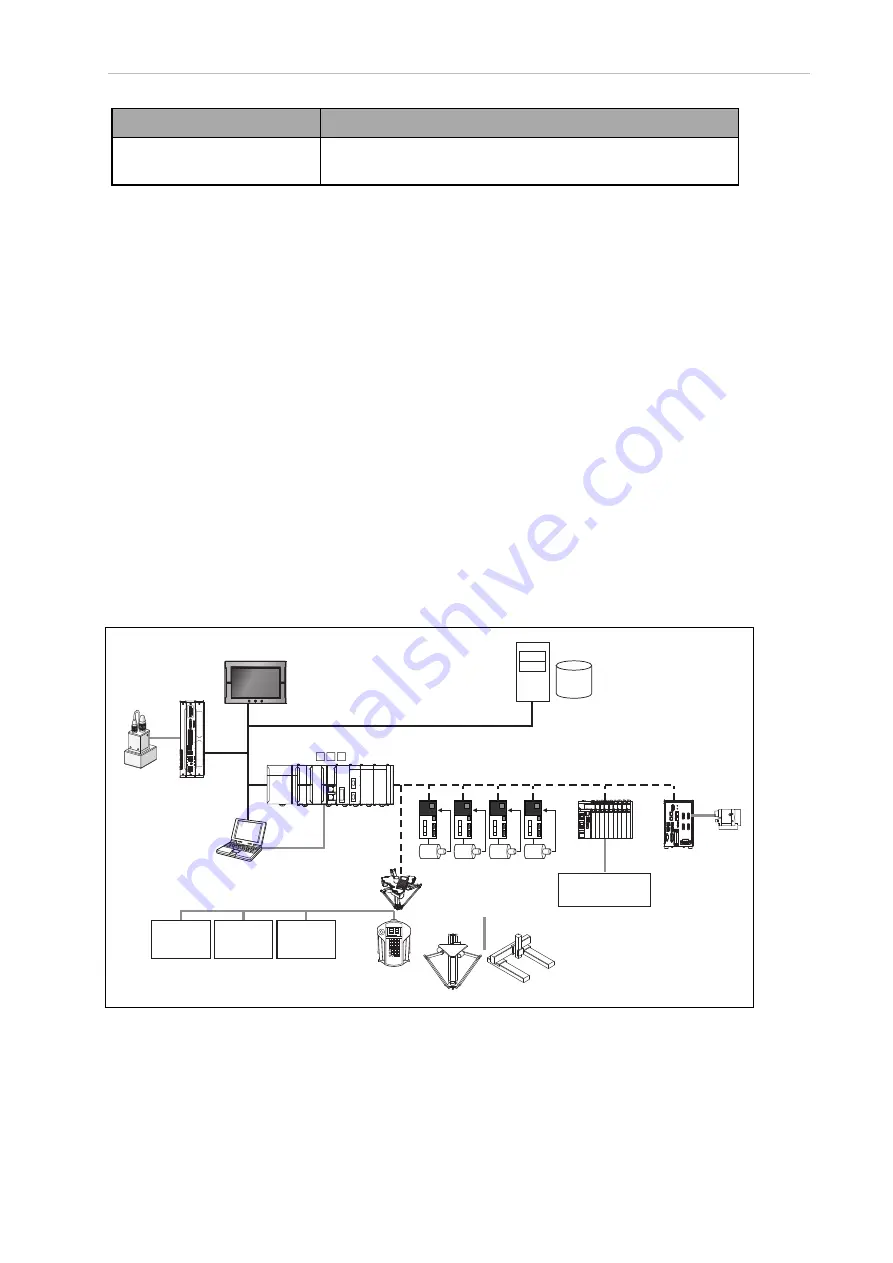
Built-in EtherCAT communications allow this robot to operate together with EtherCAT slaves,
other Sysmac products, and the Sysmac Studio Automation Software to achieve optimum func-
tionality and ease of operation.
NA-series
PT
Teaching pendant
T20
(with built-in EtherCAT
communications)
Slave
Terminal
Vision sensor
OMRON
robot
Robot Integrated CPU Unit
NJ501-R
I/O control
external devices
1S-series Servo Drives
G5-series Servo Drives
Server
Relational database
USB
Camera
FH-series Vision
Systems
Robots controllable by NJ Robotics function
EtherCAT
Application Controller
Sysmac Studio
EtherNet/IP
Front Panel
Safety
devices
Encoder,
digital I/O
Figure 1-1. EtherCAT System Topology
Two models of the iX3 565 Robot with EtherCAT are available:




































































