


























12
iX3 565 Robot with EtherCAT User’s Manual
22792-000 Rev. A
1.2 Robot Overview
Internal Control System
The iCS-ECAT has a dedicated microprocessor to communicate, coordinate, and execute servo
commands. The iCS-ECAT unit receives V+ commands from the NJ-series Robot Integrated
CPU Unit and processes these commands to execute robots motions and other functions.
The iCS-ECAT contains the robot interface panel which provides connections for power sup-
ply, peripheral devices such as the front panel, pendant, and user-supplied safety equipment,
and EtherCAT network cables. The robot interface panel also has switches for setting an expli-
cit EtherCAT Node address and operating mode as well as LED's to indicate operating status.
Additional Information
: Refer to iCS-ECAT Robot Interface Panel on page 12 for
more information.
iCS-ECAT Features
The iCS-ECAT unit has the following general features.
l
Integrated EtherCAT communications for distributed robot control.
l
Integrated digital I/O.
l
Dual 1 GHz Cortex A9 ARM Processors, 1 GB SDRAM.
l
8 GB MicroSD card.
l
Low EMI for use with noise sensitive equipment.
l
No external fan.
l
8 kHz servo rate to deliver low positional errors and high-performance path following.
l
Digital feed-forward control to maximize efficiency, torque, and positioning.
l
Internal temperature sensors for hardware protection and troubleshooting.
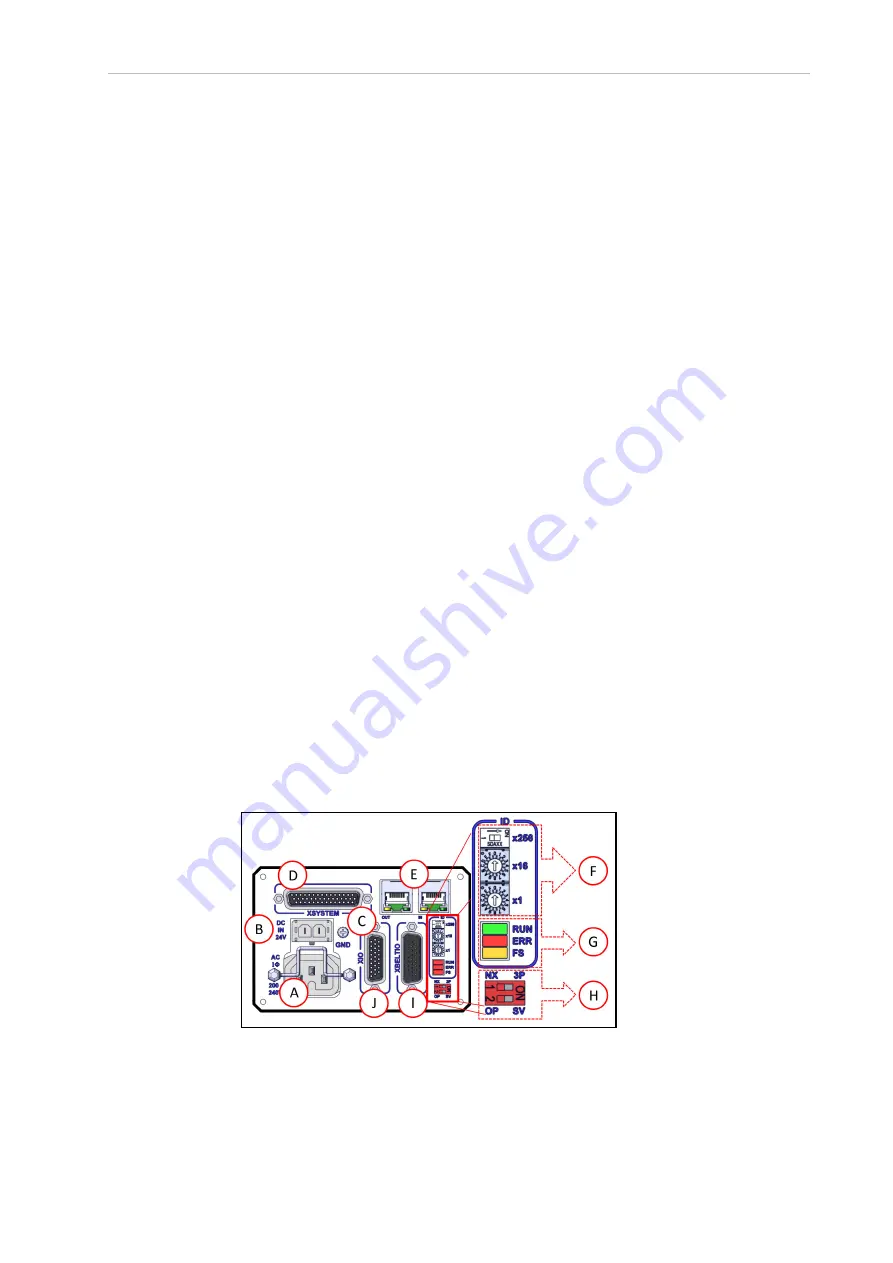
iCS-ECAT Robot Interface Panel
The iCS-ECAT includes the robot interface panel. It has connections for power (200 to 240
VAC, 24 VDC), communications, and other peripheral devices such as a pendant, IO Blox, or a
Front Panel.
Figure 1-3. iCS-ECAT Robot Interface Panel




































































