





























40
iX3 565 Robot with EtherCAT User’s Manual
22792-000 Rev. A
3.4 Installing the Platform
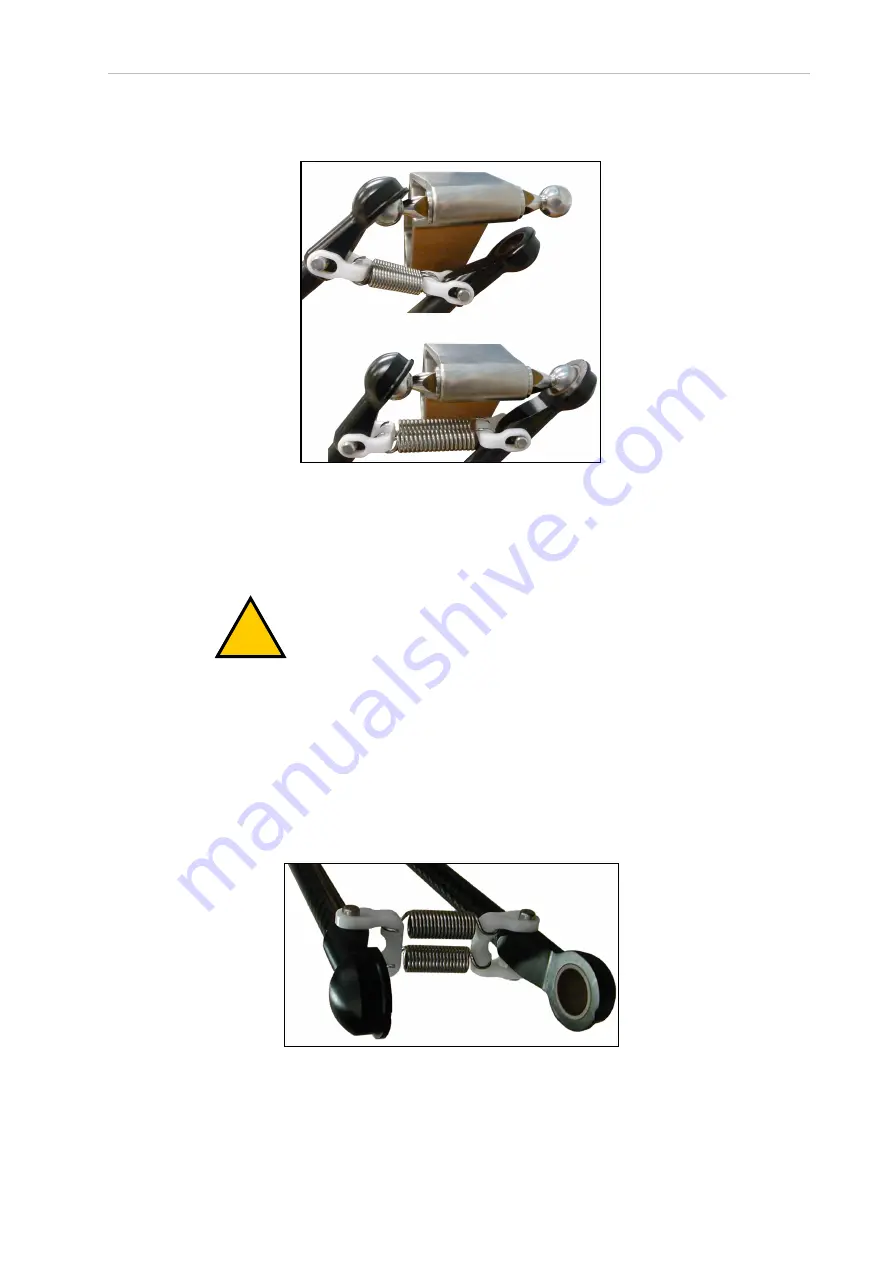
pivoting the two arms away from each other lengthwise. This requires the least stretch-
ing of the spring to attach the ball joints.
Figure 3-7. Pivot to Install Outer Arms
a. Slip one ball joint socket over the corresponding ball stud.
b. Swing the bottom end of the outer arm pair sideways as you slip the other ball
joint socket over the corresponding ball stud.
!
CAUTION:
PROPERTY DAMAGE RISK
Do not overstretch the outer arm springs. Separate the ball joint
sockets only enough to fit them over the ball studs.
2. Attach one pair of outer arms to each of the three pairs of ball studs on the platform.
a. Swing the bottom end of the outer arm pair to the right, as far as possible.
b. Slip the right ball joint socket over the right ball stud. Move the platform as
needed to do this.
c. Move the platform and outer arm pair to the left as you slip the left ball joint
socket over the corresponding ball stud.
3. Ensure that all spring hooks are fully-seated in the grooves of the spring retainers, as
shown in the following figure.







































































