





























94
iX3 565 Robot with EtherCAT User’s Manual
22792-000 Rev. A
5.6 Manually Jogging the Robot
IMPORTANT:
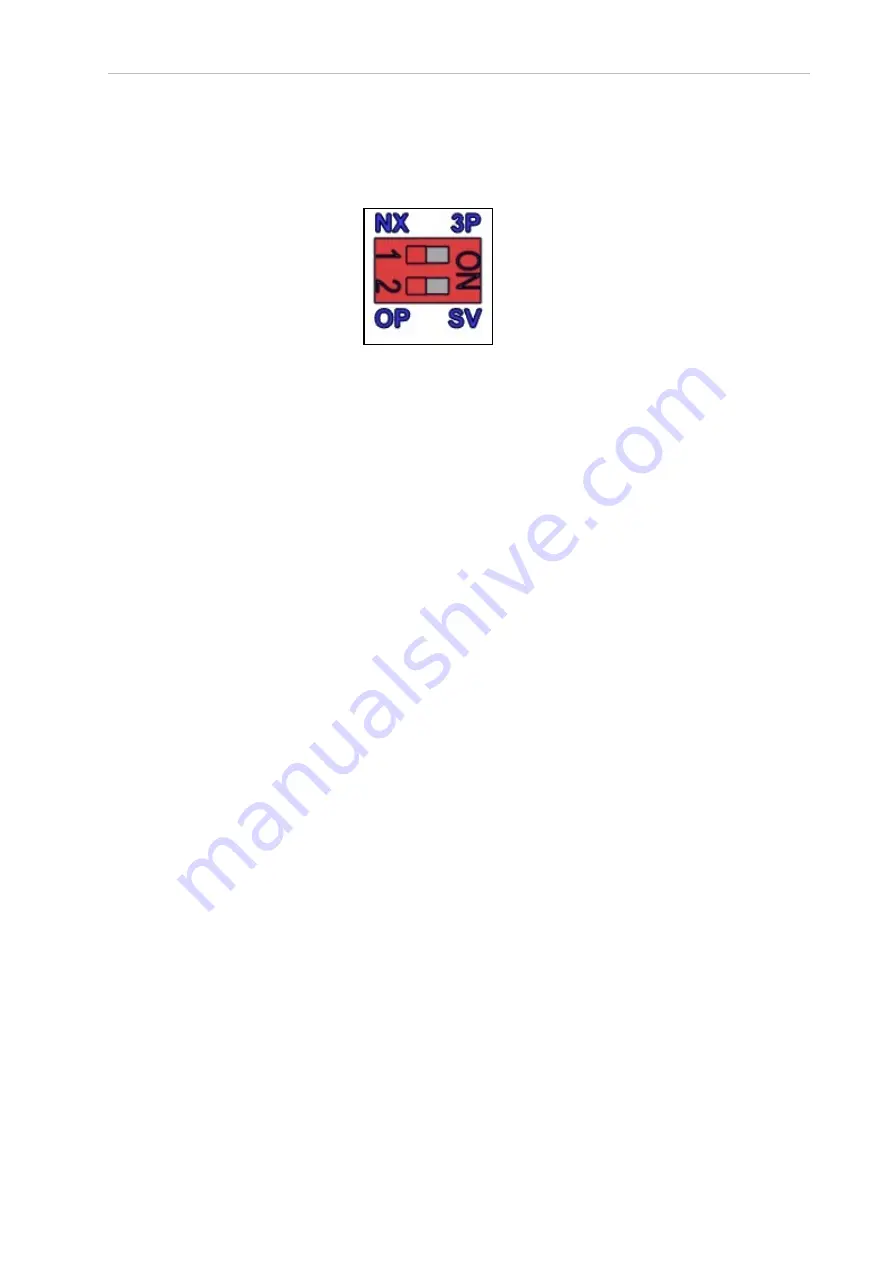
The position of the dip switch is checked during power-up only.
Changing this switch position while 24 VDC power is supplied will not change
the mode of the robot until power is cycled. It is recommended to remove all
robot power before changing the position of this switch.
Figure 5-5. Operation Mode Selected
Service Mode
Service mode is used for special conditions when the robot must be accessed with methods
other than EtherCAT communications.
NOTE:
If the robot is placed in service mode, it will not communicate with an
NJ-series Robot Integrated CPU Unit.
IMPORTANT:
The operating mode switch state is checked only during robot
startup after power is applied.
If the following conditions are present on your system, contact your local OMRON rep-
resentative for support.
l
The license mode of the robot needs to be changed.
l
EtherCAT communications cannot be achieved.
l
The robot has an unrecoverable hardware fault or error.
l
Factory recalibration.
5.6 Manually Jogging the Robot
Manually jogging the robot typically occurs during setup or other system configuration pro-
cedures. You can manually jog the robot with a connected pendant or with software.
Refer to the
T20 Pendant User's Manual (Cat. No. I601)
for complete instructions on using the
pendant to jog the robot.
If the optional pendant is not present in the system, you can move the robot using the Sysmac
Studio. Refer to the
Sysmac Studio Robot Integrated System Building Function with Robot Integrated
CPU Unit Operation Manual (Cat. No. W595)
for more information.
5.7 Enabling Robot High Power
When the robot high power is enabled, all robot servo motors are energized and the robot
enters a state where it is prepared for motion. The 200 to 240 VAC power source is used to
facilitate this state.







































































