





























3
Robot settings
3-4
2.1
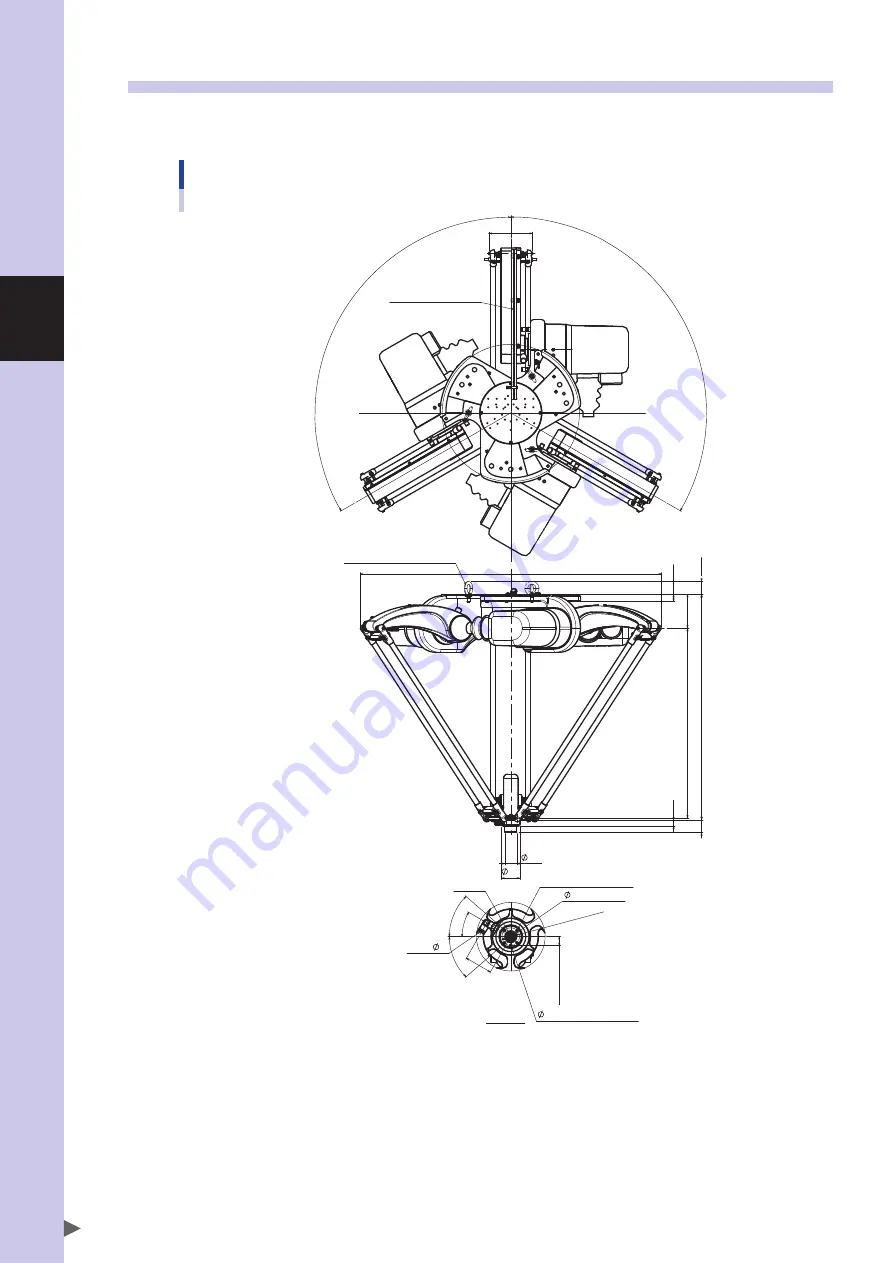
Adjusting the
α, β and γ-axis
origin position
The α, β and γ-axis origin positions are shown in the Fig. below.
Adjust each axis to its respective origin positions using the calibration jig.
α, β, γ-axis origin positions
120°
120°
Detailed drawing of
installation surface
Do not attach
tubing to θ-axis
cable.
155
Eyebolts (3 locations)
(1067)
120
(46)
25
45
22
(673)
799
65
42
A
4-M5×0.8
depth
8
Rc1/8
49
30°
45°
45°
Joint 6
15.75±0.02
5H7
+0.012
0
depth 10
View A
P.C.D.31.5
20 depth 3







































































