





























8 Applied Settings
8 - 100
High-function General-purpose Inverter RX2 Series User’s Manual
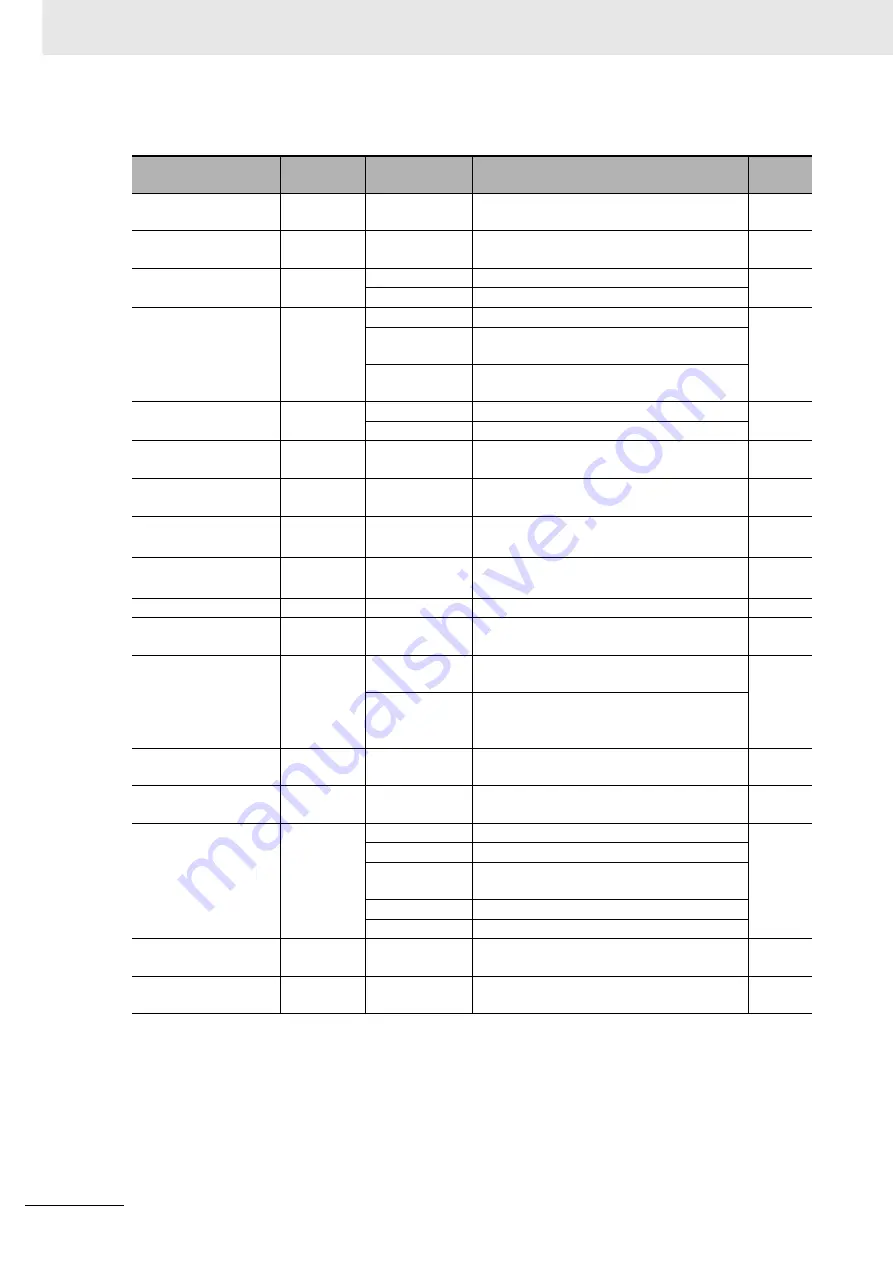
Setting Items for the Pulse Train Position Control
Item
Parameter
Data
Description
Default
data
Control mode
selection, 1st-motor
[AA121]
10
Vector control with sensor
00
Vector control mode
selection, 1st-motor
[AA123]
01
Pulse train position control mode
00
Pulse train detection
object selection
[ob-10]
00
Pulse train frequency command
00
01
Pulse train position command
Mode selection of
pulse train input
[ob-11]
00
MD0: 90° phase difference pulse train
01
01
MD1: Forward/reverse rotation c
pulse train
02
MD2: Forward rotation pulse train + reverse
rotation pulse train
Electronic gear setting
point selection
[AE-01]
00
FB: Feedback side
00
01
REF: Command side
Electronic gear ratio
numerator
[AE-02]
1 to 9999
Numerator of th electronic gear
1
Electronic gear ratio
denominator
[AE-03]
1 to 9999
Denominator of th electronic gear
1
Position feed-forward
gain setting
*1
*1. It is recommended to start position control feedforward gain adjustment with AE-06 set to 2.00. To reduce the
position deviation between the main and sub motors, increase the feedforward gain. If motor hunting occurs,
reduce the feedforward gain.
[AE-06]
0.00 to 655.35
Position feed forward gain.
0.00
Position loop gain set-
ting
*2
*2. It is recommended to start position loop gain adjustment with AE-07 set to 2.00. To increase the positioning
accuracy and the holding power, increase the position loop gain. If the position loop gain is set too high and
causes hunting, decrease the position loop gain.
[AE-07]
0.00 to 100.00
Position loop gain.
0.50
Position bias setting
[AE-08]
-2048 to 2048
Set the bias value of the position.
0
Add frequency setting,
1st-motor
[AA106]
-590.00 to
590.00(Hz)
Frequency added when the [ADD] terminal
is turned on.
0.00
Position deviation
error mode selection
[bb-85]
00
The excessive position deviation signal
[PDD] is output.
00
01
The output of the excessive position devia-
tion signal [PDD] and the position deviation
error [E106] cause a trip.
Position deviation
error detection level
[bb-86]
0 to 65535
(×100pls)
The level for deciding an abnormal position
deviation.
4096
Position deviation
error detection time
[bb-87]
0.0 to 5.0(s)
Set the time until [PDD] is outputted or an
error occurs.
0.5
Selecting the input ter-
minal
[CA-01] to
[CA-11]
014
ADD: Set speed addition
-
072
PCLR: Position deviation clear
073
STAT: Input permission of the pulse train
position command
074
PUP: Adding the position bias
075
PDN: Subtracting the position bias
Selecting the output
terminal
[CC-01] to
[CC-07]
042
PDD: Excessive position deviation signal
-
Pulse train position
deviation monitor
[dA-26]
-2147483647 to
2147483647
Displays the position deviation for the posi-
tion command and position feedback.
-
Summary of Contents for RX - 2
Page 1: ...High function General purpose Inverter RX2 Series User s Manual I620 E1 01 3G3RX2...
Page 54: ...1 Overview 1 22 High function General purpose Inverter RX2 Series User s Manual...
Page 136: ...2 Design 2 82 High function General purpose Inverter RX2 Series User s Manual...
Page 592: ...8 Applied Settings 8 192 High function General purpose Inverter RX2 Series User s Manual...
Page 754: ...11 Options 11 56 High function General purpose Inverter RX2 Series User s Manual...
Page 794: ...12 Troubleshooting 12 40 High function General purpose Inverter RX2 Series User s Manual...
Page 919: ......







































































