





























Chapter 7: Maintenance
This chapter provides information about maintaining the robot.
During any maintenance-related activities, care must be taken involving AC power lockout. It
is your responsibility to make sure that you observe the following:
l
Lockout/ tagout power to the robot and related equipment.
l
Make sure that the robot cannot be energized during maintenance, as mandated by
Clause 5.2.4 of ISO 10218-1.
7.1 Periodic Maintenance
This section lists when to perform periodic maintenance on your robot and the steps for check-
ing each item to inspect.
NOTE:
Additional maintenance may be necessary for IP54/65 and Cleanroom
robot options. Refer to IP54/65 Option Considerations on page 129 and Clean-
room Option Considerations on page 131 for more information.
Periodic Maintenance Schedule
The following table gives a summary of the periodic maintenance procedures and guidelines
on frequency.
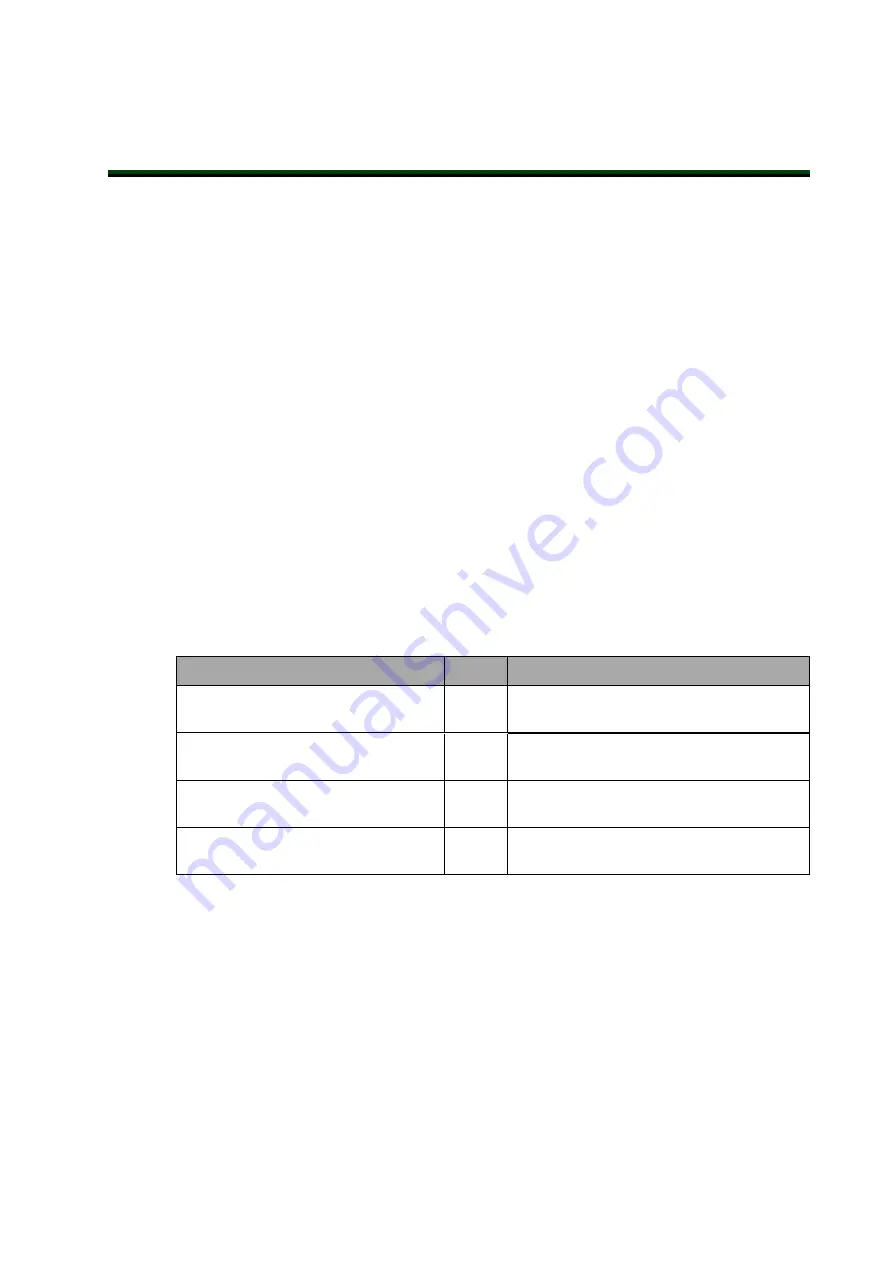
Table 7-1. Inspection and Maintenance
Item to Inspect
Period
Reference
Check E-Stop, enable and key
switches, and barrier interlocks
6
months
Checking Safety Systems on page 97
Check robot mounting bolts
6
months
Refer to Checking Robot Mounting Bolts
and Cover Plates on page 98
Check Safety Labels
1 week
Refer to Checking Safety and Warning
Labels on page 98
Replace encoder battery
2 to 4
years
Replacing the Encoder Batteries on page 99
NOTE:
The frequency of these procedures will depend on the particular system,
its operating environment, and amount of usage. Use the times in this table as
guidelines and modify the schedule as needed.
Checking Safety Systems
Use the following steps to check all robot safety devices that may be present in the system.
These tests should be done every six months.
IMPORTANT:
Operating any of the following safety devices should disable
robot high power.
21861-000 Rev A
Viper 650 and 850 Robot with EtherCAT
97



































































